Bridge pier underwater surface attachment cleaning method and underwater operation robot
A technology for cleaning robots and attachments, applied in cleaning methods and utensils, cleaning methods using liquids, chemical instruments and methods, etc. A wide range of adaptations, ensuring the effect of safe use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
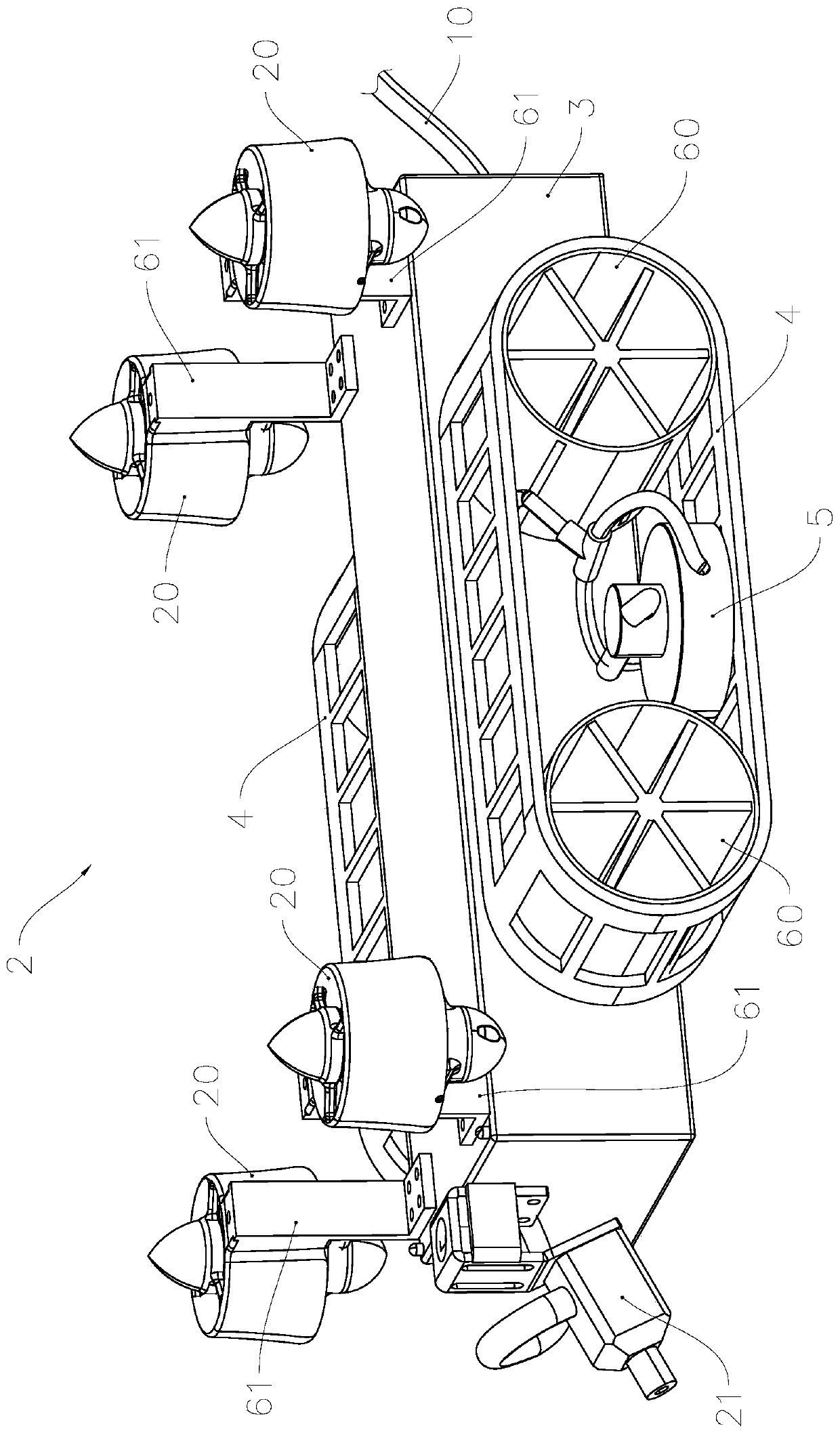
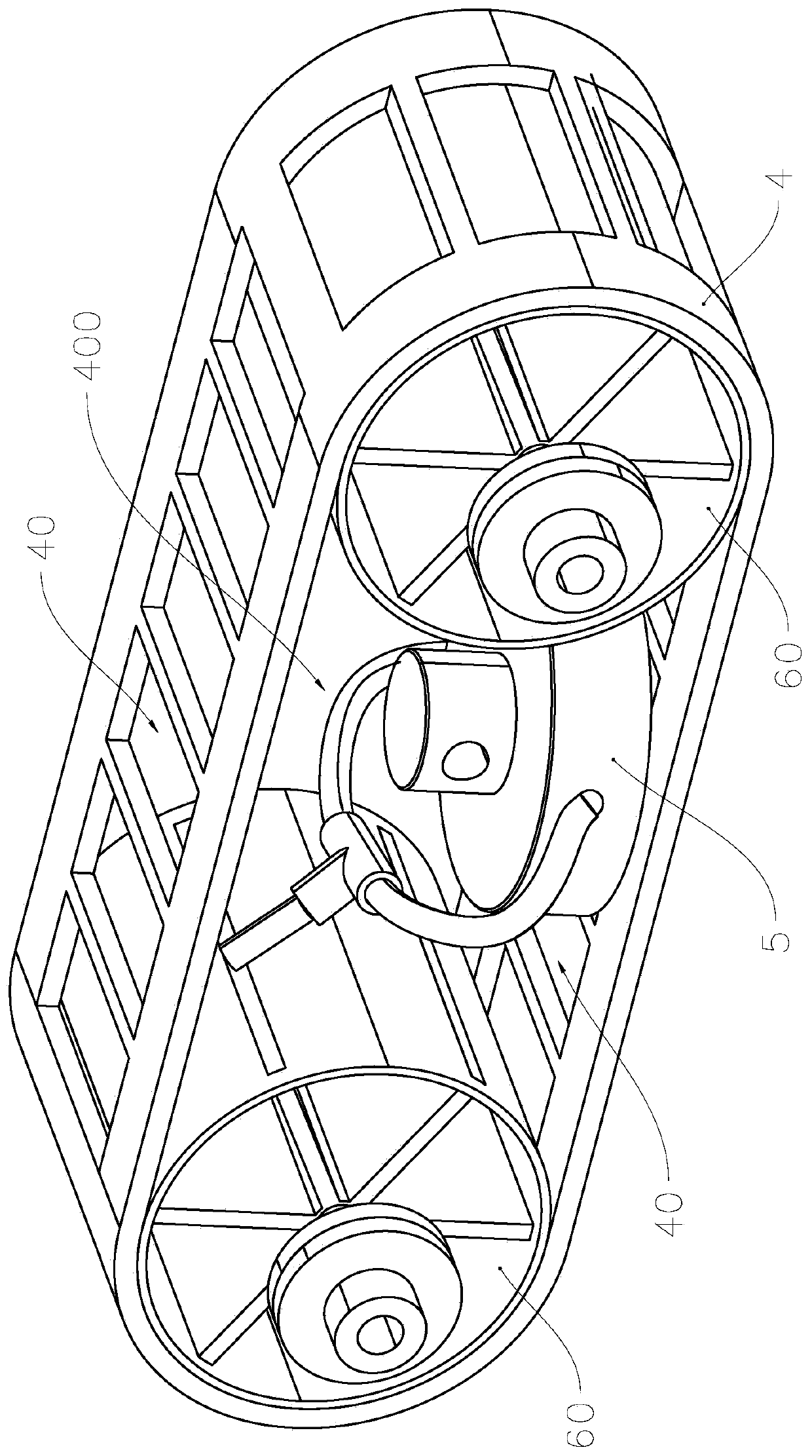
[0042] see figure 1 , the underwater cleaning system 1 applicable to the cleaning method of the underwater surface attachments of bridge piers of the present invention includes an underwater working robot 2 and a pump arranged on the bridge deck 01 and supplying high-pressure water to the underwater working robot 2 through a composite umbilical cable 10 machine 11, and provide the cables in the composite umbilical cable 10 to supply electric energy and communication signals to the underwater working robot 2, that is, the composite umbilical cable 10 is at least integrated with communication lines, energy supply lines and high-pressure water flow pipes; for communication, it can Use the wireless module to communicate, or add a wireless communication module to communicate in wired and wireless ways. In this embodiment, the underwater working robot 2 constitutes an underwater cleaning robot due to the integrated cleaning module. The composite umbilical cable 10 is composed of a ...
Embodiment 2
[0069] As a description of Embodiment 2 of the present invention, only the differences from Embodiment 1 above will be described below.
[0070] Such as Figure 11 As shown, the spraying direction of the cavitation jet cleaning spray head 21 is arranged and installed on the side of the frame 3 along the direction perpendicular to the extending direction of the flexible track 4 .
[0071] see Figure 12 to Figure 16 After controlling the underwater cleaning robot 2 to clean out a fuselage accommodating groove 07 with a width greater than the distance between the outer edges of the flexible crawlers 4 on both sides on the pier surface 02, then Figure 12 The shown pier surface 02 full of attachments 03 is cleaned out of the fuselage accommodation tank 07, and then the position of the underwater cleaning robot 2 is adjusted until the flexible crawlers 4 on both sides are placed in the fuselage accommodation tank 07, and then the current The cleaning treatment of the strip-shape...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com