Self-adaptive robust control method based on double-electric-cylinder synchronous motion error modeling
An adaptive robust, error modeling technology, applied in adaptive control, general control systems, control/regulation systems, etc., can solve problems such as uncertain nonlinearity, and achieve the effect of overcoming the influence of control accuracy and reducing the influence.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example
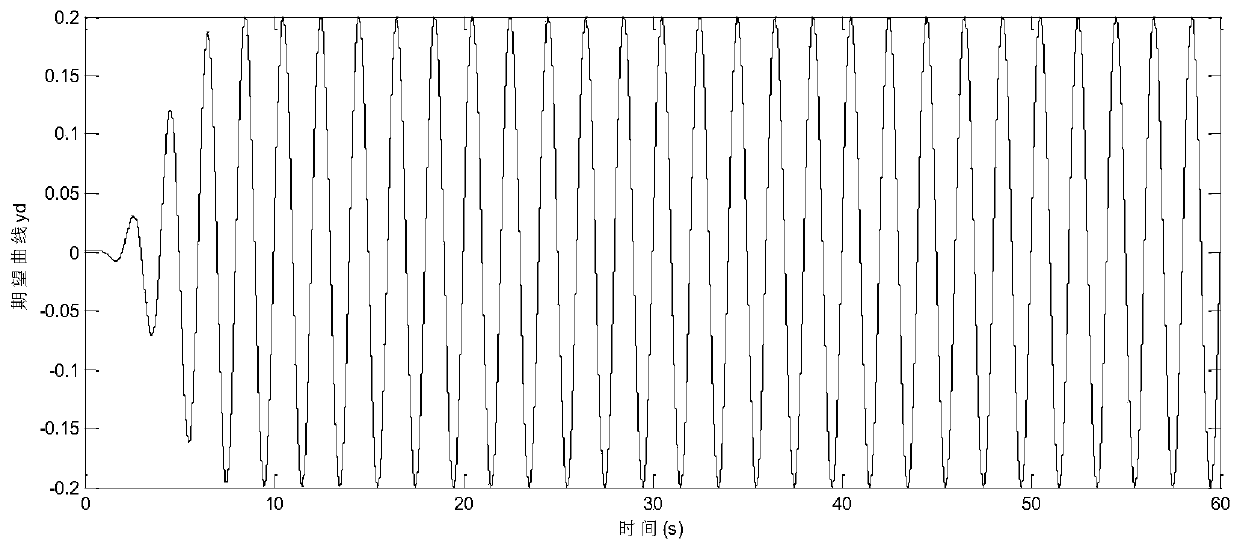
[0093] The simulation parameters are: smooth function S f (·)He was elected Robust control part u s1 + u s2 was selected as -K r s, with a sufficiently large feedback gain K in the implementation r , the parameter adaptive adaptation rate is set as Γ=[30,30,20,20,20,20,3000,3000] T , to track the desired sinusoidal trajectory The amplitude is 0.2m, the frequency is 0.5Hz. Select Λ=diag[120,80] and K r =diag[70,50]. The initial values of the parameter estimates are set to (1) In the working condition where there are only constant disturbances, (2) In the case of constant disturbances, an impact disturbance is added at 40s.
[0094] The effect of the controller is as Figure 3 to Figure 10As shown, it can be seen that the algorithm proposed by the present invention has good control performance in the simulation environment, and the controller designed by it can ensure good control accuracy in the presence of parameter uncertainties and large disturbances. The resea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com