Carrier dynamic attitude estimation method based on MEMS inertial sensor
An inertial sensor and attitude estimation technology, applied in the field of MEMS sensing, can solve the problems of gyroscope drift error, poor dynamic performance, large error, etc., and achieve the effect of reducing drift error and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
[0117] Example 2 Effect experiment comparison
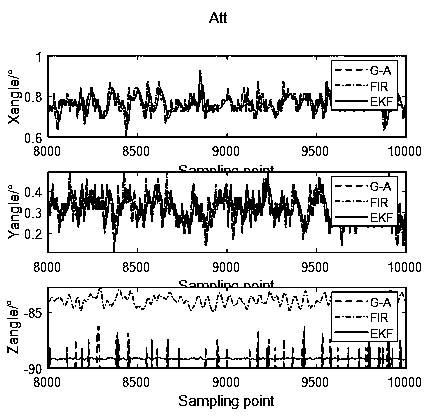
[0118] This article sets up three sets of experiments for comparison to verify the effectiveness of the algorithm. The three sets of experiments are: 1) Static state plus high-frequency vibration experiment, the results are as follows image 3 As shown; 2) The swing test is carried out at a frequency of 0.5 Hz and an amplitude of ±5°. The results are as follows Figure 4 Shown; 3) Rotation test at an angular velocity of 50° / s, the results are as follows Figure 5 Shown. Each group of experiments is composed of three kinds of attitude calculation algorithms: the attitude calculation algorithm (GA) using the accelerometer, the attitude calculation algorithm (FIR) using FIR filtering, and the EKF filtering algorithm (EKF) designed in this application. Test the performance of the three algorithms in different situations.
[0119] by image 3 It can be seen that in the state of vibration, the GA algorithm has large fluctuations with an err...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com