A data fusion method and device
A data fusion and target data technology, applied in the field of data processing, can solve the problems of inaccurate detection results, adverse effects of millimeter wave radar detection, and reduce object detection accuracy, so as to overcome the low detection accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
no. 1 example
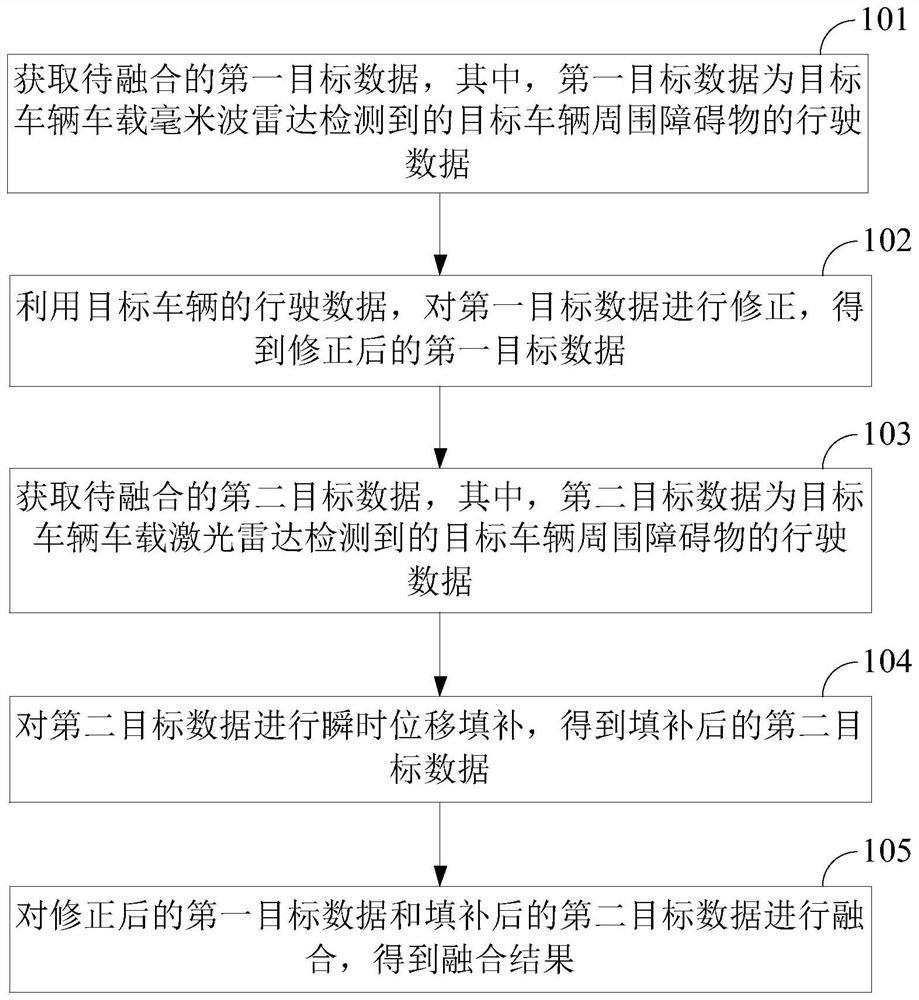
[0075] see figure 1 , which is a schematic flowchart of a data fusion method provided in this embodiment, the method includes the following steps:
[0076] S101: Acquire first target data to be fused, wherein the first target data is driving data of obstacles around the target vehicle detected by the vehicle-mounted millimeter-wave radar of the target vehicle.
[0077] In this embodiment, any vehicle that uses this embodiment to achieve data fusion is defined as the target vehicle. In order to realize the fusion of driving data that detects obstacles around the target vehicle, it is first necessary to obtain the first target data to be fused .
[0078] Wherein, the first target data refers to the driving data of obstacles around the target vehicle detected by the vehicle-mounted millimeter-wave radar of the target vehicle. An optional implementation is that the driving data of obstacles around the target vehicle may include Obstacle position information and speed information...
no. 2 example
[0122] This embodiment will introduce a data fusion device, and for relevant content, please refer to the foregoing method embodiments.
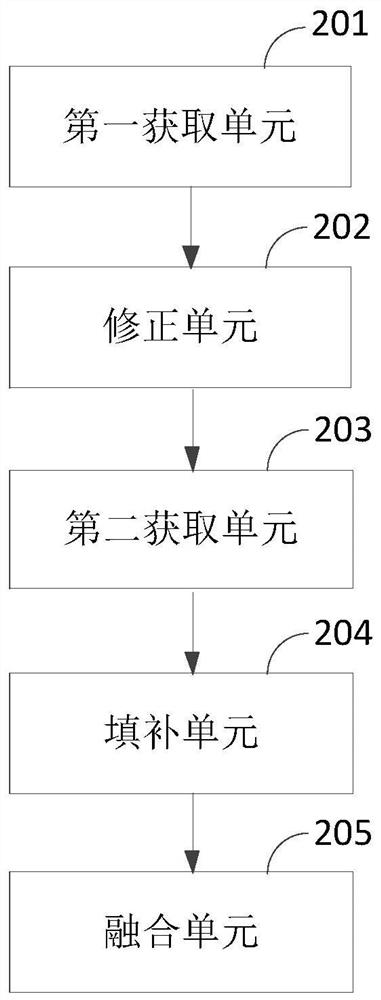
[0123] see figure 2 , which is a schematic diagram of the composition of a data fusion device provided in this embodiment, the device includes:
[0124] The first acquisition unit 201 is configured to acquire the first target data to be fused, the first target data being the driving data of obstacles around the target vehicle detected by the vehicle-mounted millimeter-wave radar of the target vehicle;
[0125] A correction unit 202, configured to use the driving speed of the target vehicle to correct the first target data to obtain corrected first target data;
[0126] The second acquisition unit 203 is configured to acquire the second target data to be fused, the second target data being the driving data of obstacles around the target vehicle detected by the vehicle-mounted lidar of the target vehicle;
[0127] A padding unit 204, config...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com