Intelligent order grabbing method and device, and computer-readable storage medium
A single-device, intelligent technology, applied in the direction of computing, measuring devices, instruments, etc., can solve the problem of high server performance requirements, and achieve the effect of improving order receiving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
[0102] Based on the first embodiment, the second embodiment of the intelligent order grabbing method of the present invention is proposed, referring to Figure 5 , in this embodiment, step S100 includes:
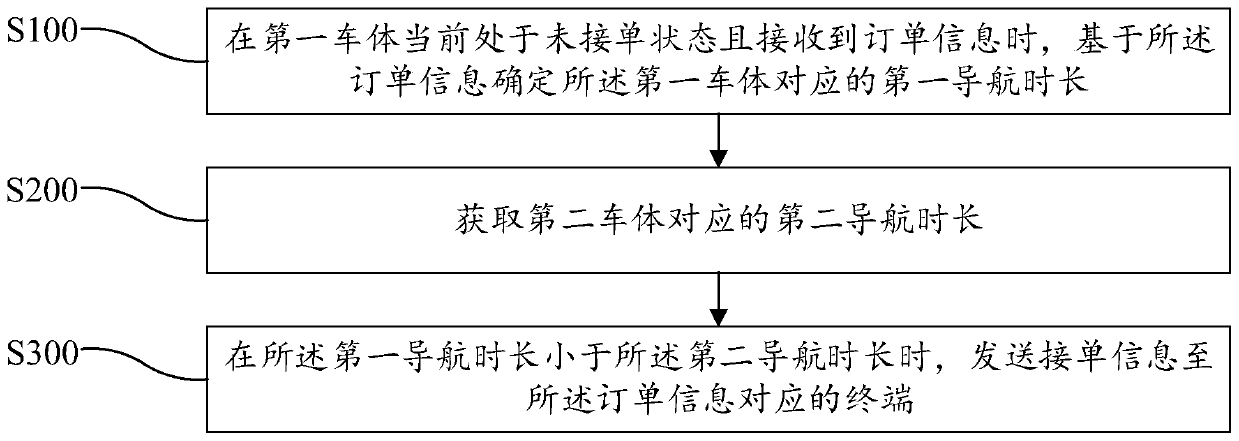
[0103] Step S110, when the first vehicle body is currently in the state of not receiving an order and order information is received, obtain the current first location information of the first vehicle body, and obtain destination location information based on the order information;
[0104] Step S120, acquiring current second position information of a third vehicle body, wherein the third vehicle body is a vehicle body other than the first vehicle body in the driving environment where the first vehicle body is located;
[0105] Step S130: Determine a first navigation route based on the first location information, the second location information, and the destination location information, and determine a first navigation duration based on the first navigation route.
[0106] W...
no. 2 example
[0135] Based on the second embodiment, the sixth embodiment of the intelligent order grabbing method of the present invention is proposed. In this embodiment, step S100 includes:
[0136] Step S140, acquiring route planning point information corresponding to the first navigation route, and determining the driving time corresponding to the first navigation route based on the route planning point information;
[0137] Step S150, based on the pose information of the first vehicle body and the initial planning point corresponding to the path planning point information, determine the pose adjustment duration corresponding to the first navigation route;
[0138] Step S160: Determine the first navigation duration based on the pose adjustment duration and the driving duration.
[0139] In this embodiment, the path planning point information corresponding to the first navigation route is obtained, and the path planning point information includes the coordinates (x N ,y N ) and the ve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com