Vehicle cooperative adaptive cruise control method based on variable time gap and interval strategy
A technology of adaptive cruise and control methods, which is applied to control devices, vehicle components, input parameters of external conditions, etc., can solve the problems of unsatisfactory performance of CTH strategy, no multi-vehicle acceleration information, and no vehicle communication delay. , to achieve the effect of improving road capacity, improving traffic efficiency and ensuring driving safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0039] The present invention will be further described below in conjunction with the accompanying drawings and embodiments, and the present invention includes but not limited to the following embodiments.
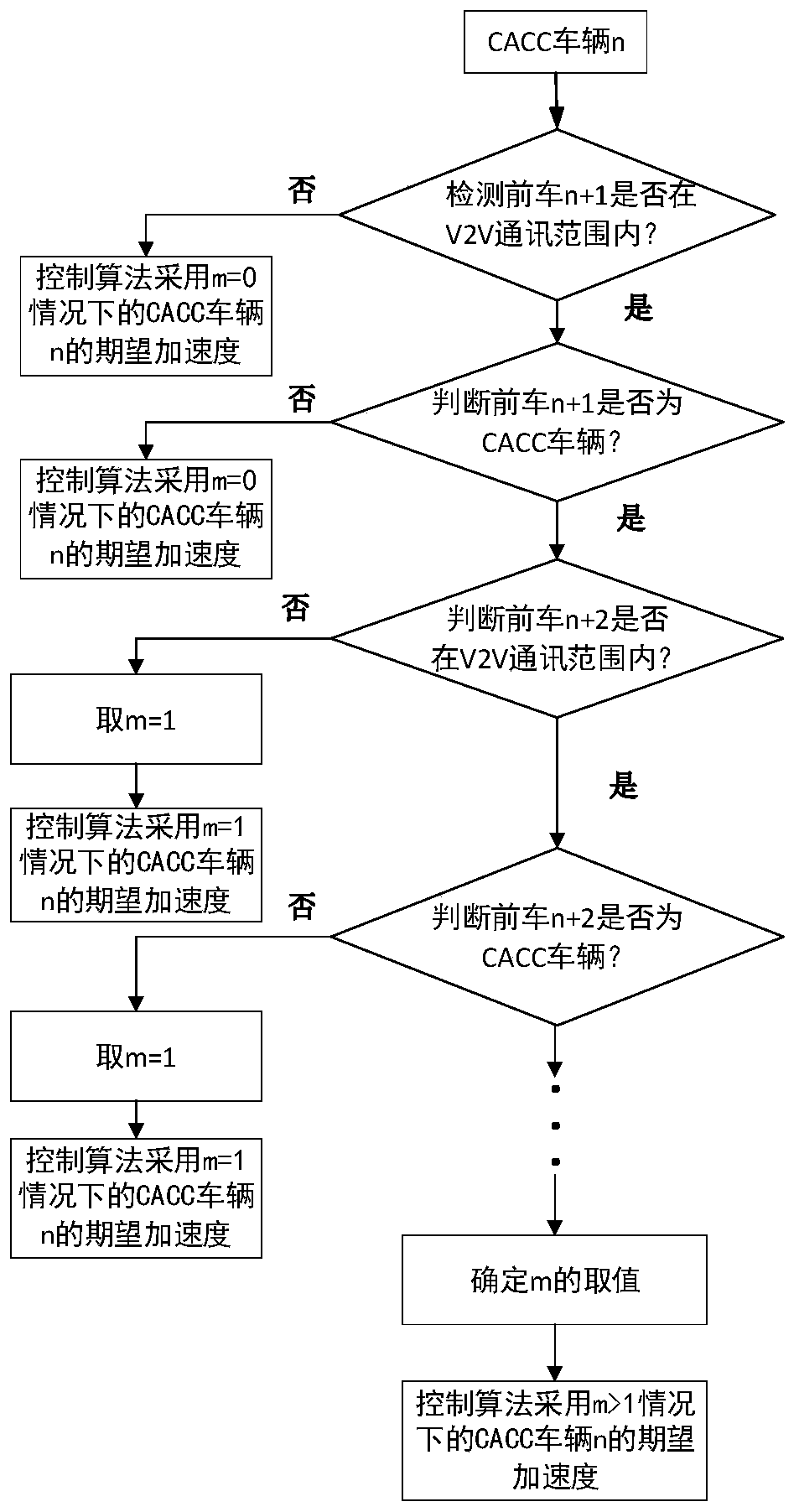
[0040] like figure 1 As shown, the present invention provides a vehicle cooperative adaptive cruise control method based on a variable time gap (Variable Time Gap, VTG) spacing strategy. Specifically include the following steps:
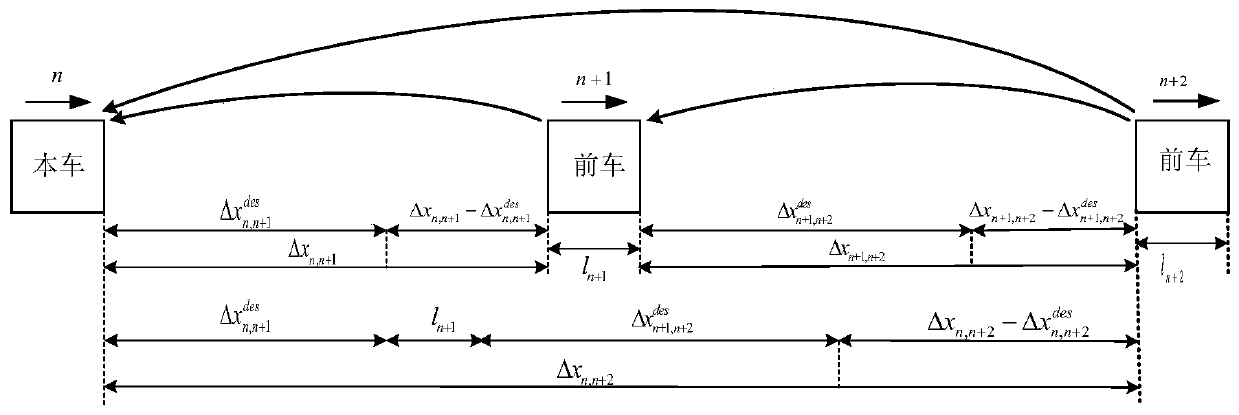
[0041] The current CACC vehicle n uses radar and on-board sensors to detect the position of the adjacent preceding vehicle n+1, such as figure 2 shown. If the distance between two cars Δx n,n+1 Less than the V2V communication range, communicate with vehicle n+1, if it can communicate, then vehicle n+1 is a CACC vehicle, and obtain the position, speed and acceleration information of vehicle n+1, otherwise, vehicle n+1 is a non-CACC vehicle or Considered a non-CACC vehicle.
[0042] If the vehicle in front is not within the communication range...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com