Automatic driving control method of special-shaped road intersection, and vehicle
An automatic driving control and vehicle technology, applied in non-electric variable control, two-dimensional position/channel control, vehicle position/route/altitude control, etc., can solve the problems of scarce heterogeneous road information and low penetration rate of high-precision maps
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0035] This embodiment discloses an automatic driving control method at a special-shaped intersection, including the following steps:
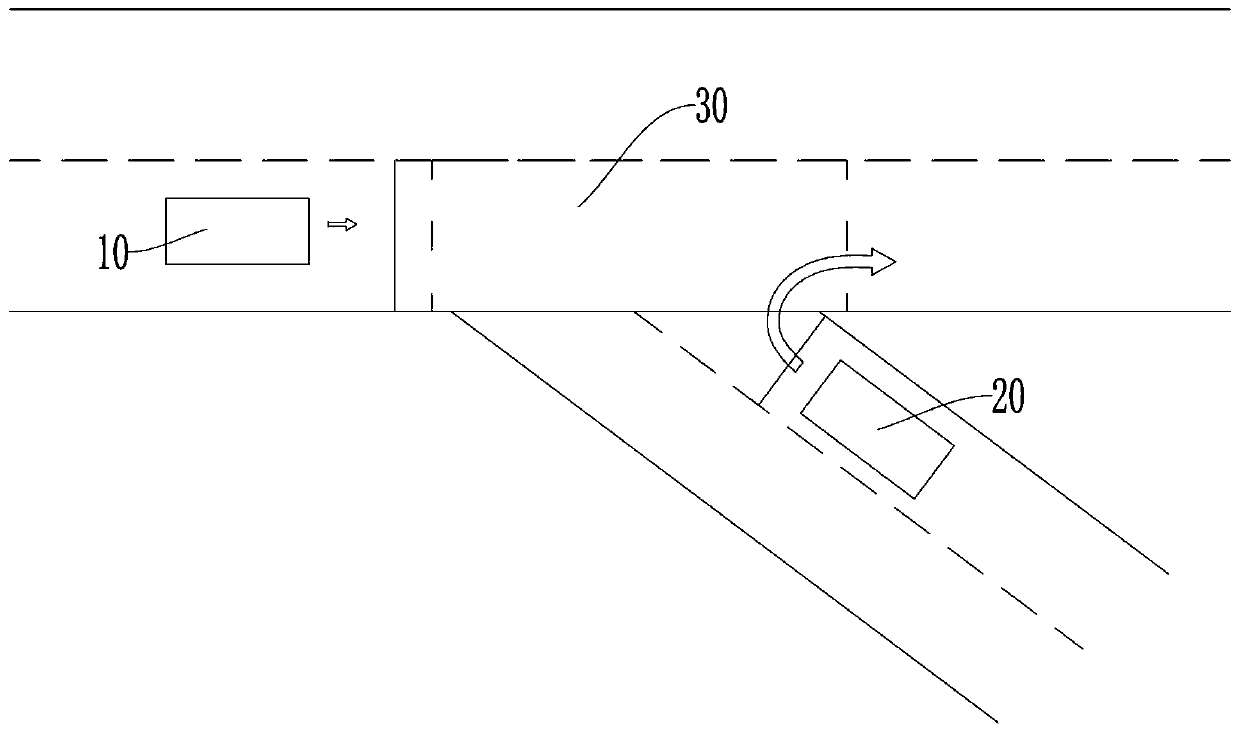
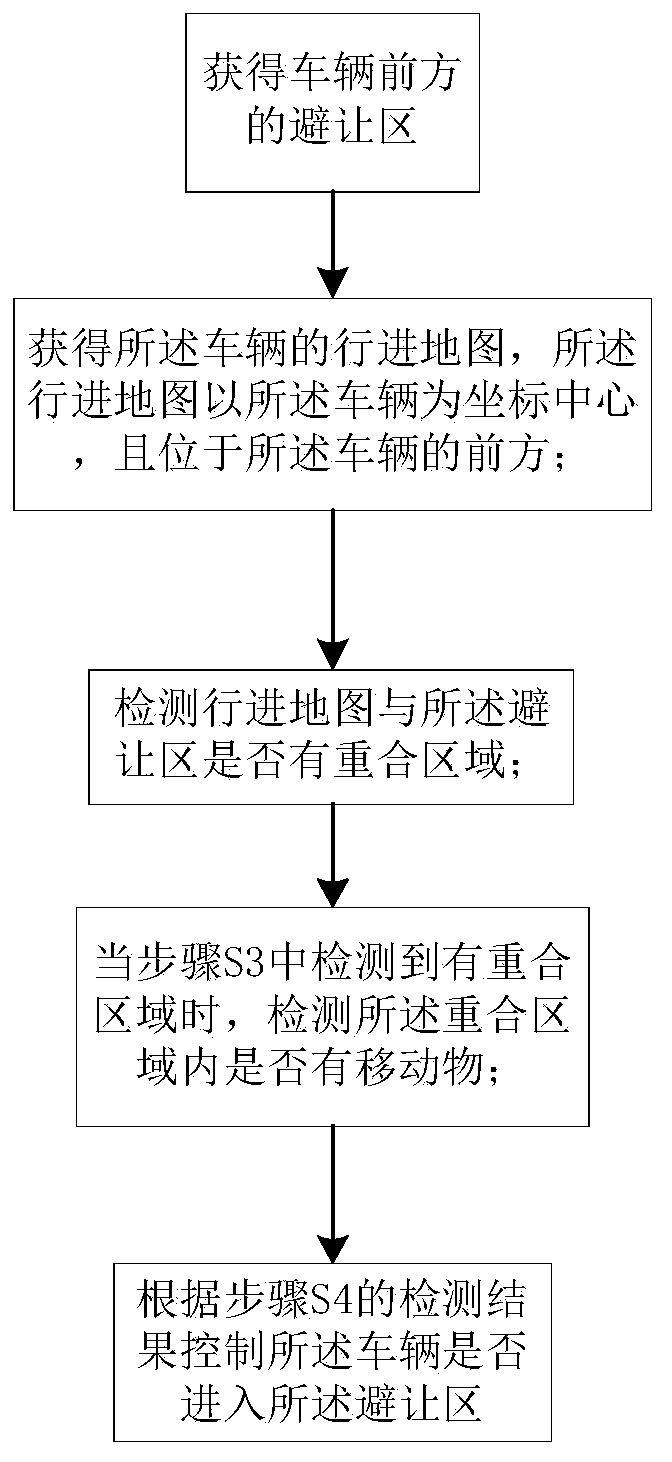
[0036] S1. Obtain the avoidance zone in front of the vehicle;
[0037] S2. Obtain the travel map of the vehicle, the travel map takes the vehicle as the coordinate center and is located in front of the vehicle;
[0038] S3. Detect whether there is an overlapping area between the traveling map and the avoidance area;
[0039] S4. When an overlapping area is detected in step S3, detect whether there is a moving object in the overlapping area;
[0040] S5. Control whether the vehicle enters the avoidance area according to the detection result of step S4.
[0041] Obtain the avoidance area and travel map in front of the vehicle, and detect whether there is an overlapping area between the two. When there is an overlapping area between the two, detect whether there is a moving object in the overlapping area, and then control the movement of the ve...
Embodiment 2
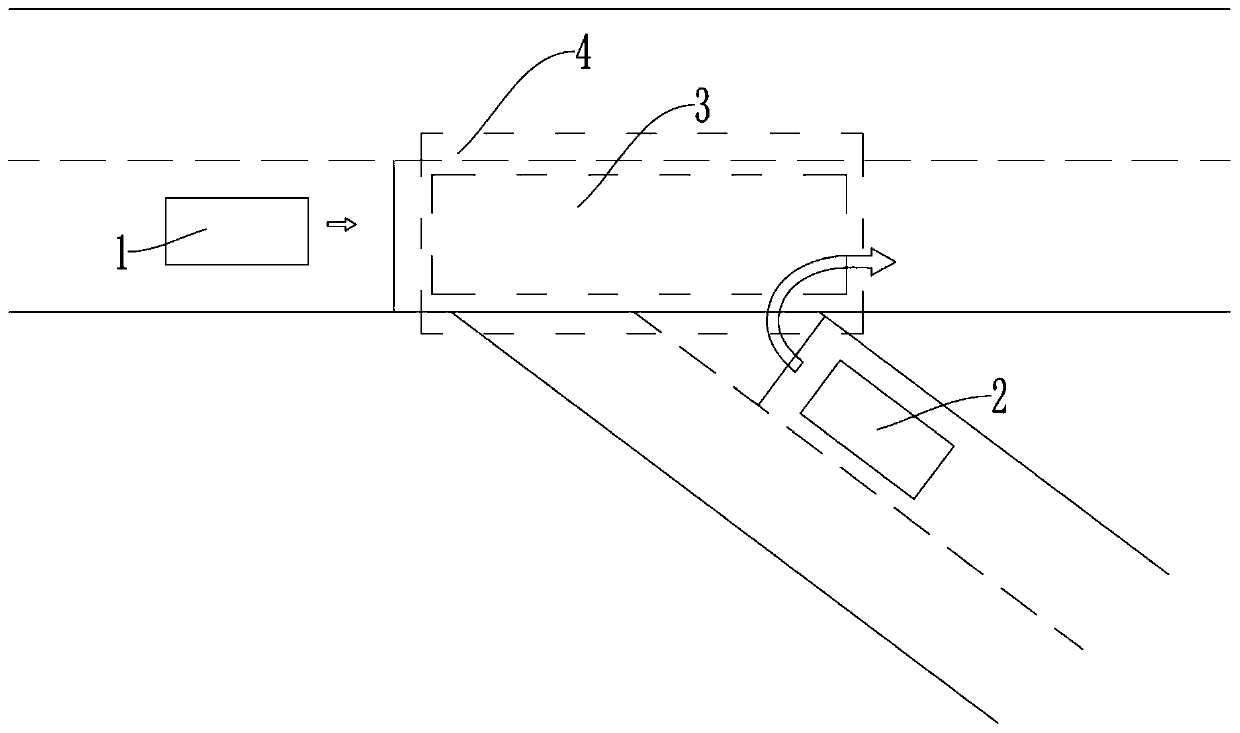
[0043] Such as figure 2 and image 3 As shown, the present embodiment discloses an automatic driving control method at a special-shaped intersection, including the following steps:
[0044] S1. Obtain the avoidance area 3 in front of the vehicle 2, and obtain the stop line in front of the vehicle 2 at the same time;
[0045] S2. Obtain the travel map 4 of the vehicle 2. The travel map 4 takes the vehicle 2 as the coordinate center and is located in front of the vehicle 2; wherein the travel map 4 and the avoidance area 3 have the same shape and are both rectangular; and the travel map 4 is slightly larger than The area of the avoidance zone 3.
[0046] S3. Detect whether there is an overlapping area between the traveling map 4 and the avoidance area 3;
[0047] S4. When an overlapping area is detected in step S3, detect whether there is a moving object 1 in the overlapping area; the moving object 1 mainly refers to pedestrians, animals, other vehicles 2, bicycles or elec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com