Superposition method of virtual prompt information after artificial intelligence object registration and identification based on AR equipment
A technology of prompting information and artificial intelligence, which is applied in the field of artificial intelligence object registration and recognition, can solve the problems that inspection and maintenance work cannot be carried out smoothly and efficiently, and achieve the effects of convenient troubleshooting, quick operation and improved work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0024] Embodiment 1 is used to identify and accurately superimpose registered objects.
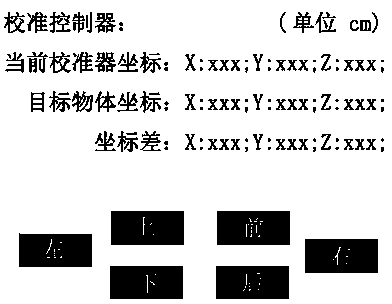
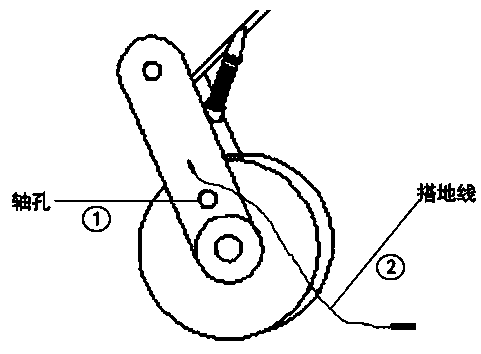
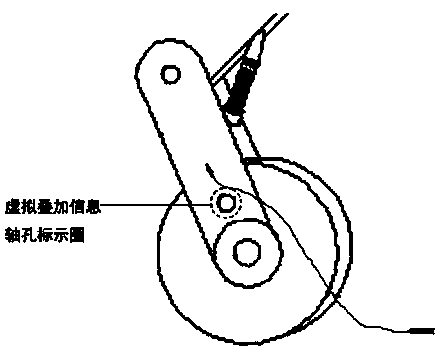
[0025] see figure 2 , image 3 , Case of identifying the shaft hole with the virtual marking circle: turn on the AR device, identify the shaft hole, and pop up the virtual shaft hole marking circle after the recognition is successful, record the current world coordinates of the current virtual shaft hole marking circle with the current calibration controller coordinates, and assign the virtual shaft hole marking circle at the same time For the calibration controller, assign its real-time world coordinates to the target object coordinates of the calibration controller; at this moment, the current calibration controller coordinates and the target object coordinates should be the same. Move the virtual axis hole marking circle in real time by calibrating the controller's "up, down, front, back, left, right" buttons. At this moment, the coordinates and coordinate differences of the target obj...
Embodiment 2
[0027] Embodiment 2 is used to identify and register objects for precise navigation.
[0028] Precise navigation for the next step after the virtual marking circle marks the shaft hole: the principle is the same as that of embodiment 1. After the virtual marking circle marks the shaft hole, the navigation indicator arrow created in the program is also assigned to the calibration controller to identify the registered shaft After the hole is successful, move the navigation indicator arrow in the same way so that it can accurately point to the position of the next step, such as Figure 4 shown. The specific performance in the case is as follows: after the shaft hole is successfully identified, the virtual marking circle pops up. After the maintenance personnel accurately insert the ground wire into the shaft hole according to the 3D animation demonstration, the side prompts "Have the shaft hole work been completed?" After clicking "Yes", the above The virtual content of shaft ho...
Embodiment 3
[0029] Embodiment 3, used to identify registered objects and accurately locate dangerous areas to alarm
[0030] Alarm case of aircraft engine dangerous area: such as Figure 5 As shown, turn on the AR device and identify the whole aircraft. After the identification is successful, assign the fan-shaped dangerous area model made in advance to the calibration controller. The principle is the same as above. Move it to the tail of the aircraft engine to completely overlap with the tail of the aircraft, and then obtain the virtual sector. The world coordinate assumption a, the real-time movement coordinate assumption b of the first perspective of the AR device, by calculating the coordinate difference c=(a-b) in the program, when c Figure 5 , Figure 6 shown.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com