Camera angle self-adaptive adjustment method for intelligent inspection robot
A self-adaptive adjustment and intelligent inspection technology, which is applied in the direction of instruments, image analysis, image data processing, etc., can solve the problems of pan-tilt rotation error, target deviation from the center of the robot camera field of view, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
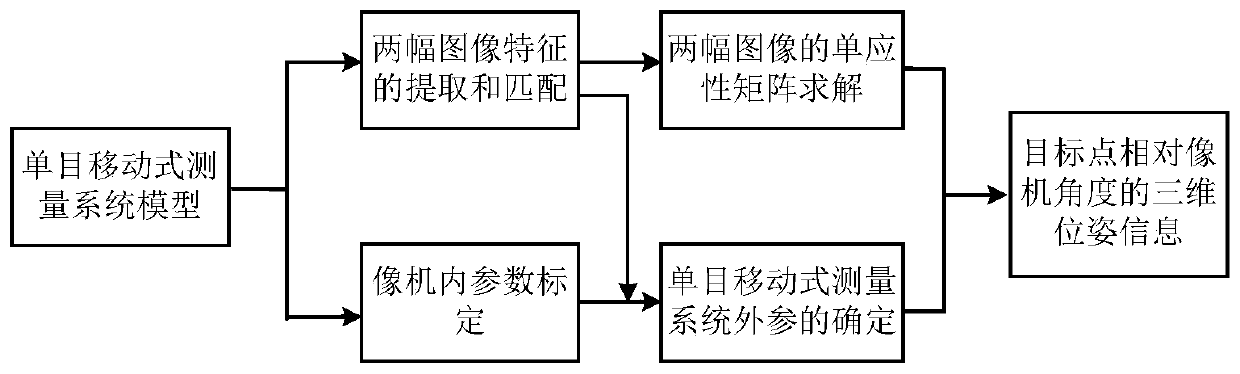
[0032] The invention discloses a camera angle adaptive adjustment method of an intelligent inspection robot, which is characterized in that it comprises the following steps:
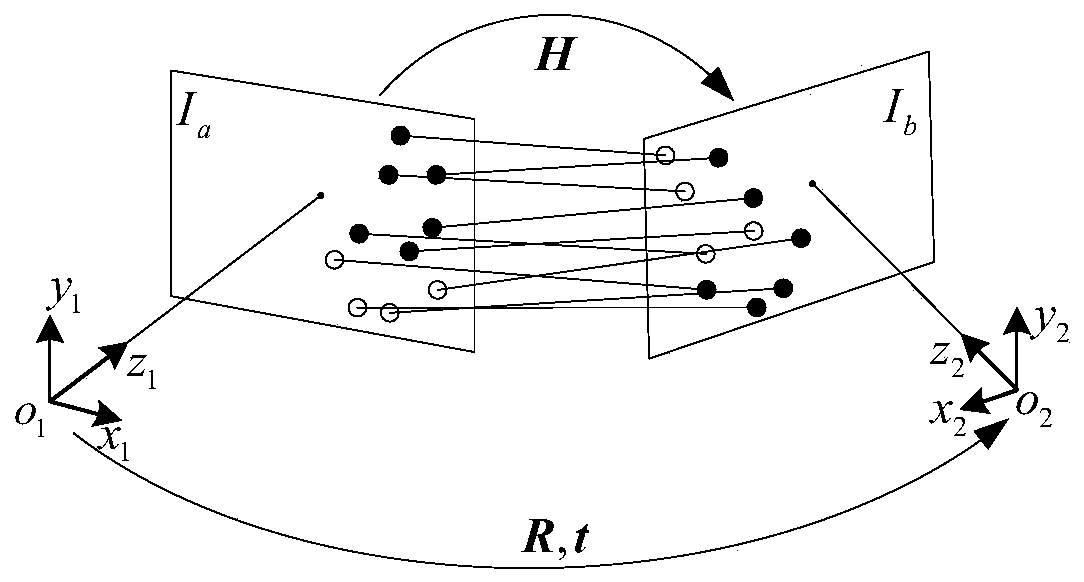
[0033] Step A. According to the pinhole imaging model of the camera, use the camera calibration method of plane grid points to establish a monocular mobile measurement system model; the mobile monocular vision measurement system is virtualized into multiple images through the movement of a camera. machine to form a multi-eye vision measurement system. The present invention analyzes the principle of a binocular stereo vision measurement system composed of mobile monocular vision by taking two images taken by a robot at two different times at a certain position to form a two-view vision measurement as an example.
[0034] Step B, obtain the internal parameter matrix of the camera according to the mapping relationship between the three-dimensional space coordinate point and the plane two-dimensional coordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com