Laser beam space pose calibration method for non-orthogonal axis laser total station
A non-orthogonal axis and laser beam technology, which is applied in the direction of instruments, measuring instruments, and optical devices, can solve the problems of laser beams being fixed and moving frequently, so as to expand the calibration range, meet a wide range of applications, and coordinate space points Measuring Precise Effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
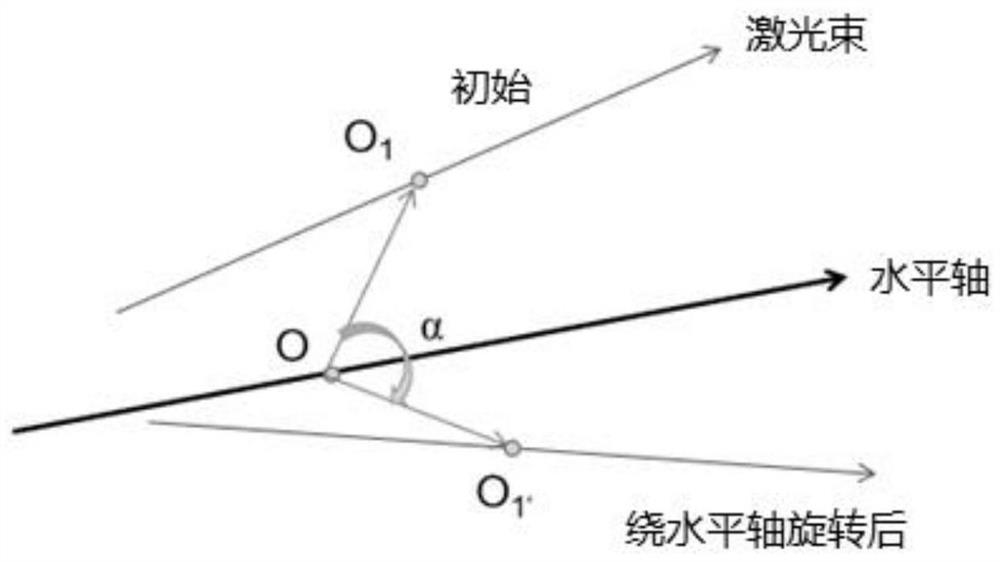
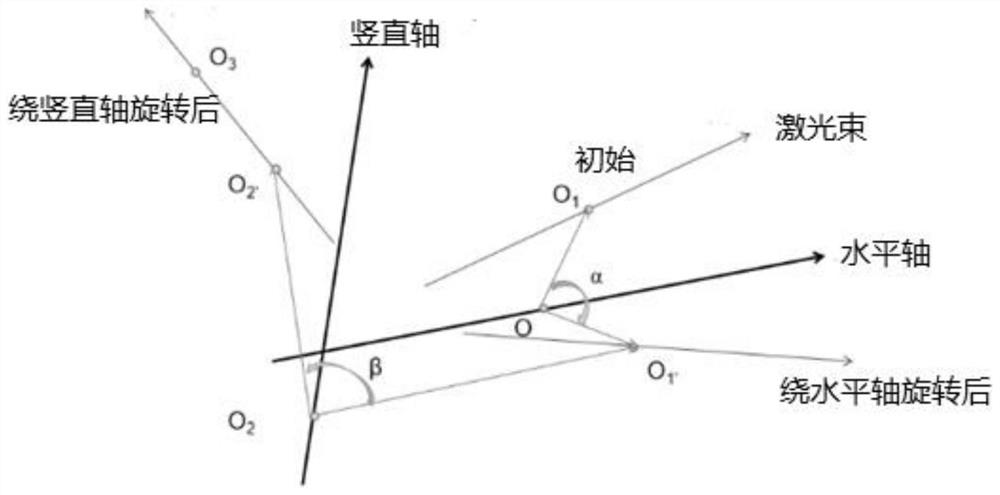
[0036]The laser beam pose calibration method based on machine vision in large-scale space proposed by the present invention uses the horizontal axis and vertical axis parameters of the high-precision two-dimensional turntable that has been calibrated to drive the high-precision two-dimensional turntable to drive the The laser rotates in space, using the fixed point and direction vector on the horizontal and vertical axes of the two-dimensional turntable as a reference, the direction vector and coordinates of the laser beam and the fixed point on it after rotation are obtained, and finally fitted by least squares Algorithm to calculate the spatial pose of the laser beam.
[0037] The pose calibration system of the laser beam in a large-scale space is mainly composed of a high-precision two-dimensional turntable, a laser to be calibrated, a 5 million industrial camera, a laser tracker, a reflective hollow target ball and a hemispherical target. Among them, the reflective hollow ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com