


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Vehicle-mounted integrated high-precision positioning device and positioning method
A positioning device, high-precision technology, applied in satellite radio beacon positioning system, navigation through speed/acceleration measurement, instruments, etc., can solve problems such as high cost, increase user development and debugging workload, and achieve easy loading integrated effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
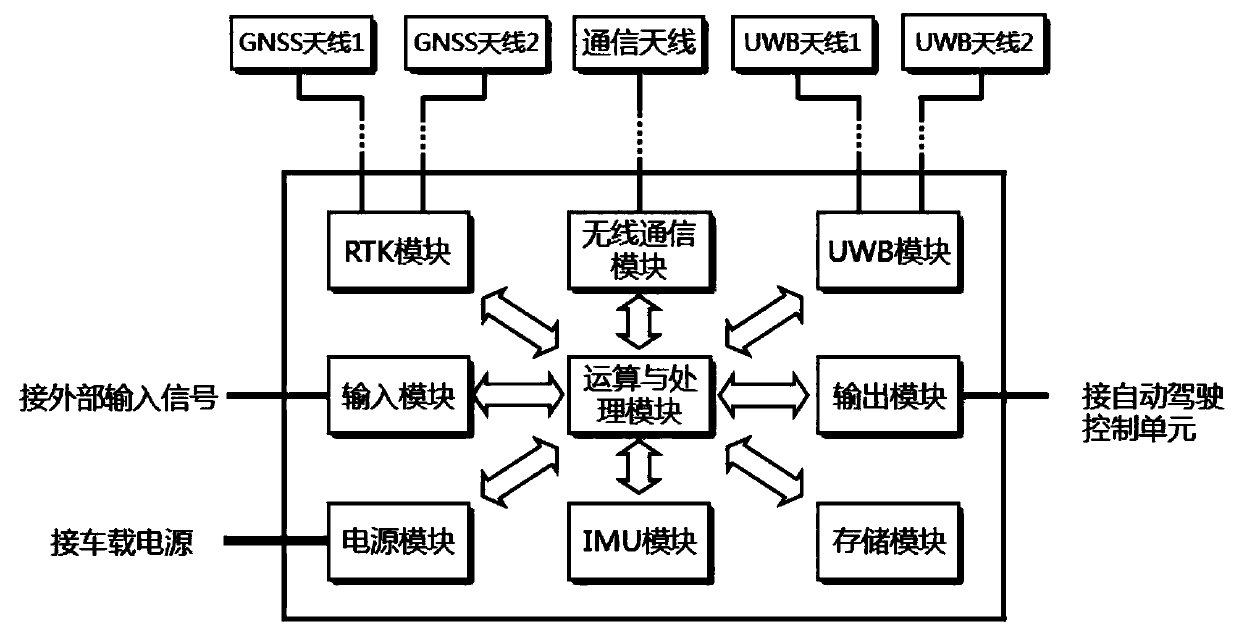
[0044] Such as figure 1 As shown, a vehicle-mounted integrated high-precision positioning device includes: 1) the calculation and processing module is responsible for monitoring and scheduling the operation of other modules, and the core algorithm for realizing positioning calculation and fusion;
[0045] 2) The RTK module (including a pair of GNSS antennas) is responsible for receiving and processing GNSS original observation signals, and obtains differential data from local reference stations or CORS systems based on wireless communication links, and then performs differential calculations to output high-precision position information;
[0046] 3) The UWB module (including a pair of UWB antennas) is responsible for receiving and processing ultra-wideband signals transmitted by different base stations to measure the distance between the module and each base station, and further solve the relative and absolute coordinates of the module;
[0047] 4) The IMU module is responsible ...
Embodiment 2
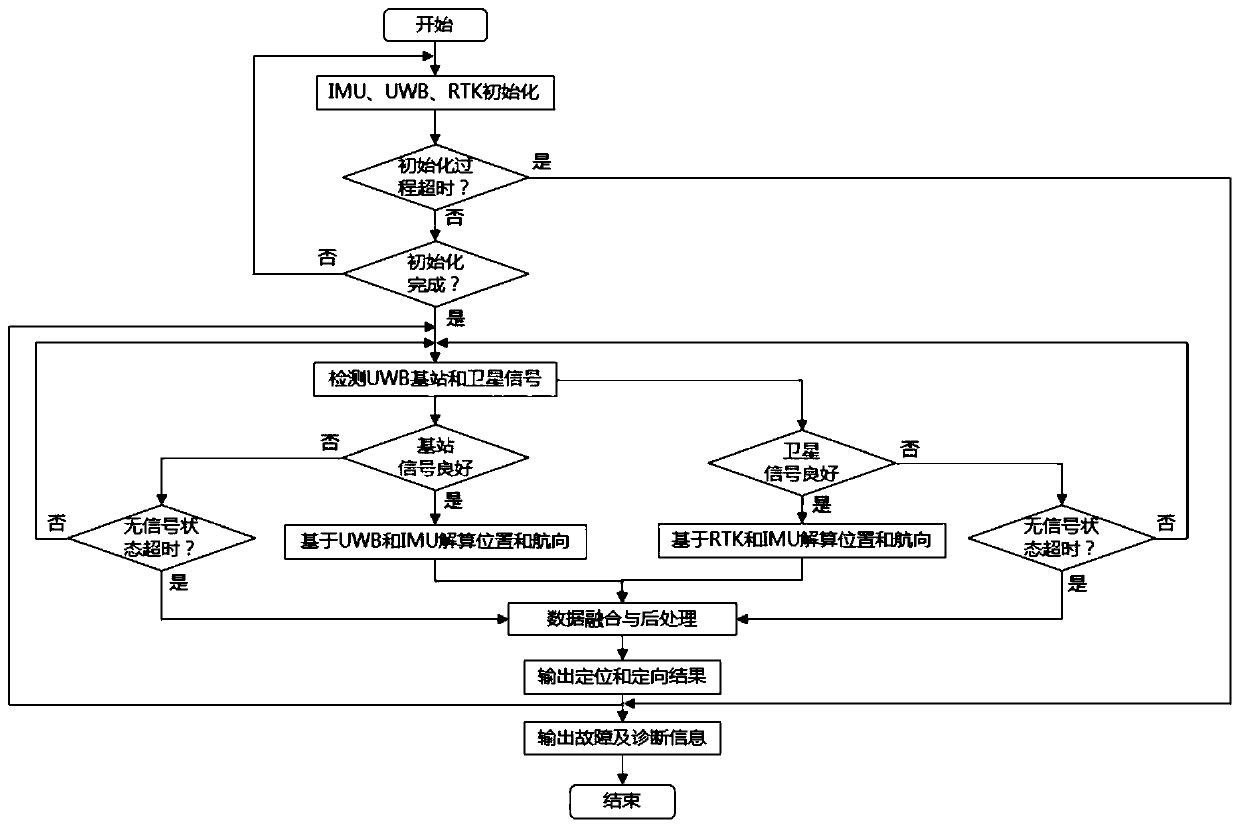
[0057] Such as figure 2 As shown, a vehicle-mounted integrated high-precision positioning method includes the following steps:
[0058] S1: Initialize the RTK module, UWB module and IMU module, if the initialization process is completed normally, enter step S2, otherwise output the corresponding fault prompt information and exit;
[0059] S2: Use the UWB module to detect the UWB base station signals deployed around. If more than the preset number of base station stable UWB pulse signals can be received at the same time, it is determined that the base station signal is good, and based on the output signals of the UWB module and the IMU module, the real-time position and location of the vehicle are calculated. Heading, then enter step S4;
[0060] S3: Detect GNSS satellite signals through the RTK module. If more than the preset number of satellite signals can be received at the same time, it is determined that the satellite signals are good, and based on the output signals of ...
Embodiment 3
[0067] Such as Figure 4 As shown, further on the basis of Embodiment 1 and Embodiment 2, the unmanned transport vehicle in the figure is applied to the on-site material transfer scene of a certain factory, and the integrated high-precision positioning device described in this paper is installed on the On the chassis of the unmanned transport vehicle, the UWB antenna and GNSS antenna at the front and rear of the vehicle are connected to the positioning equipment through corresponding transmission cables. The unmanned transport vehicle travels between the material warehouse and the production workshop according to a pre-designed route. A certain number of UWB base stations are installed in the material warehouse and production workshop. When the vehicle is running in the indoor environment (inside the material warehouse and the production workshop), the positioning device receives the signal transmitted by the UWB base station through the front and rear UWB antennas; when the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com