Mobile robot planning method based on visibility graph guidance
A mobile robot, view technology, applied in the field of robotics to achieve the effect of improving efficiency, reducing blindness, and improving quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
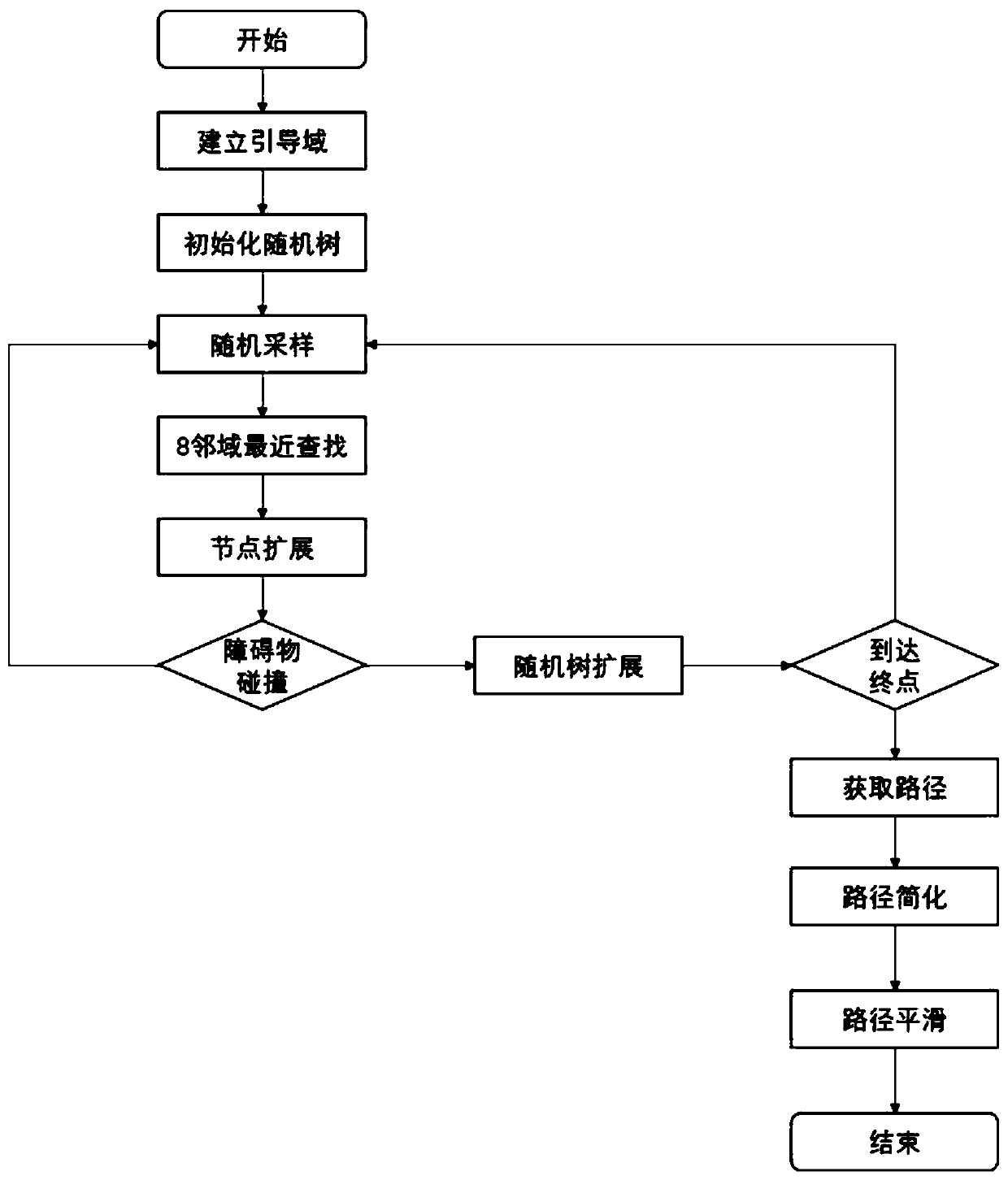
[0043] like figure 1 As shown, a visual graph-guided planning method for mobile robots, including visual graph-guided domain generation, improved Rapidly Extended Random Tree (RRT), and path optimization;
[0044] The generation of the visual map guide field is based on the visual map method to model the obstacle environment, and then obtain the reference path from the starting point to the end point through the shortest path search method, and then generate the reference area, that is, the view guide field;
[0045] The improved fast-extending random tree is based on the fast-extending random tree programming method. Firstly, the unmanned vehicle planning motion model is established, and the sampling points are randomly obtained first, and the sampling point and the nearest node in the random tree are determined by the 8-neighborhood nearest neighbor node method. , and then judge whether the new node is inserted into the random tree according to the motion model of the unmann...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com