Vehicle state estimation method based on adaptive volume particle filtering
A particle filter and vehicle state technology, which is applied in calculation, special data processing applications, complex mathematical operations, etc., can solve problems such as difficulty in determining scale factors and quantization factors, divergence phenomena, and reduced estimation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0075] The vehicle state estimation method of the present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
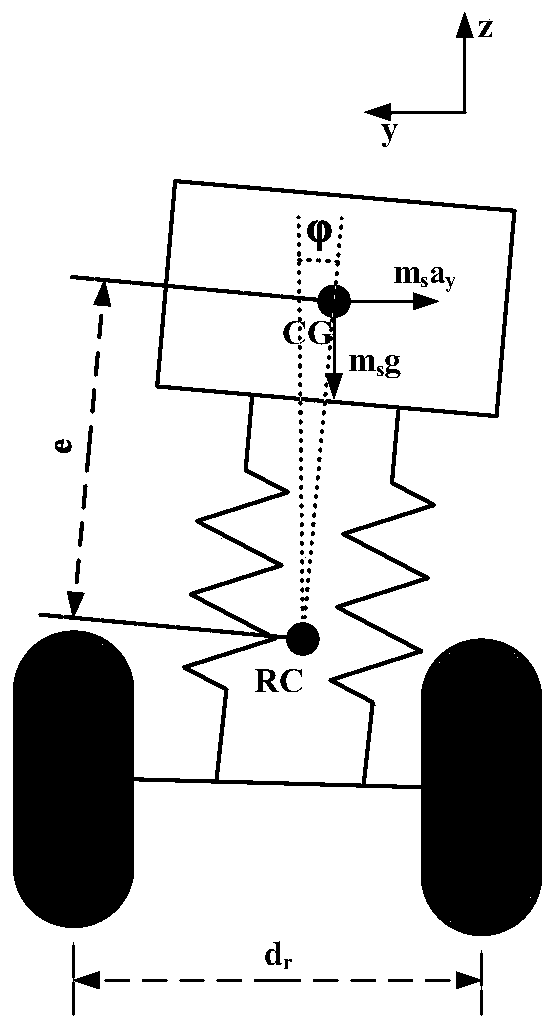
[0076] Such as Figure 2a and 2b As shown, an eight-degree-of-freedom vehicle dynamics model is established first.
[0077] The dynamic equation of longitudinal motion is:
[0078]
[0079] The lateral motion dynamic equation is:
[0080]
[0081] The dynamic equation of roll motion is:
[0082]
[0083] The dynamic equation of yaw motion is:
[0084]
[0085] In the formula, m is the total mass of the vehicle, m s is the sprung mass of the vehicle, V x is the longitudinal velocity of the center of mass of the vehicle, V y is the lateral velocity of the center of mass of the vehicle, w r is the center of mass yaw rate, e is the height of the roll arm, is the roll angle of the center of mass, p is the roll angular velocity of the center of mass, δ is the steering wheel angle, ΣF x is the lon...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com