A fuzzy predictive control method with enhanced robustness based on disturbance observer
A disturbance observer and fuzzy prediction technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as difficulty in operating under large-scale variable working conditions, degradation of pipeline predictive control performance, and unstable results. , to solve strong disturbances and model mismatches, improve stability, and improve performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0043] The present invention will now be described in further detail with reference to the accompanying drawings.
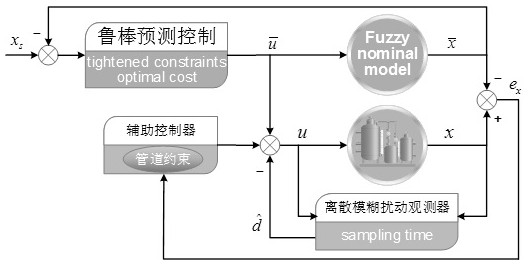
[0044] 1. The research model and control scheme structure of the present invention
[0045] For a strongly nonlinear system, it can be expressed in the form of T-S fuzzy sub-model shown in Eq. (1) by approximate modeling method in different fuzzy regions, and the sampling period is taken as T s .
[0046] Fuzzy rule l: if v 1 belong and n υ belong but:
[0047] x(k+1)=A l x(k)+B l (u(k)+d(k)) (1)
[0048] In the formula, is the number of fuzzy rules; is a fuzzy subset; ν:=[v 1 , v 2 , ..., ν υ ] is the fuzzy scheduling parameter; and are the state vector, the input of the system and the lumped disturbance, respectively; A l and B l is the system matrix belonging to the lth fuzzy rule.
[0049] lumped disturbance It includes the uncertainty of the controlled object, the mismatch component of the model, the modeling error and the external d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com