Lane line drawing method and device and storage medium
A lane line and data technology, applied in the computer field, can solve the problems of high point cloud data processing requirements of acquisition equipment, high cost of lane line drawing, and errors, etc., to reduce the cost of data collection, reduce data accuracy requirements, guarantee accurate effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
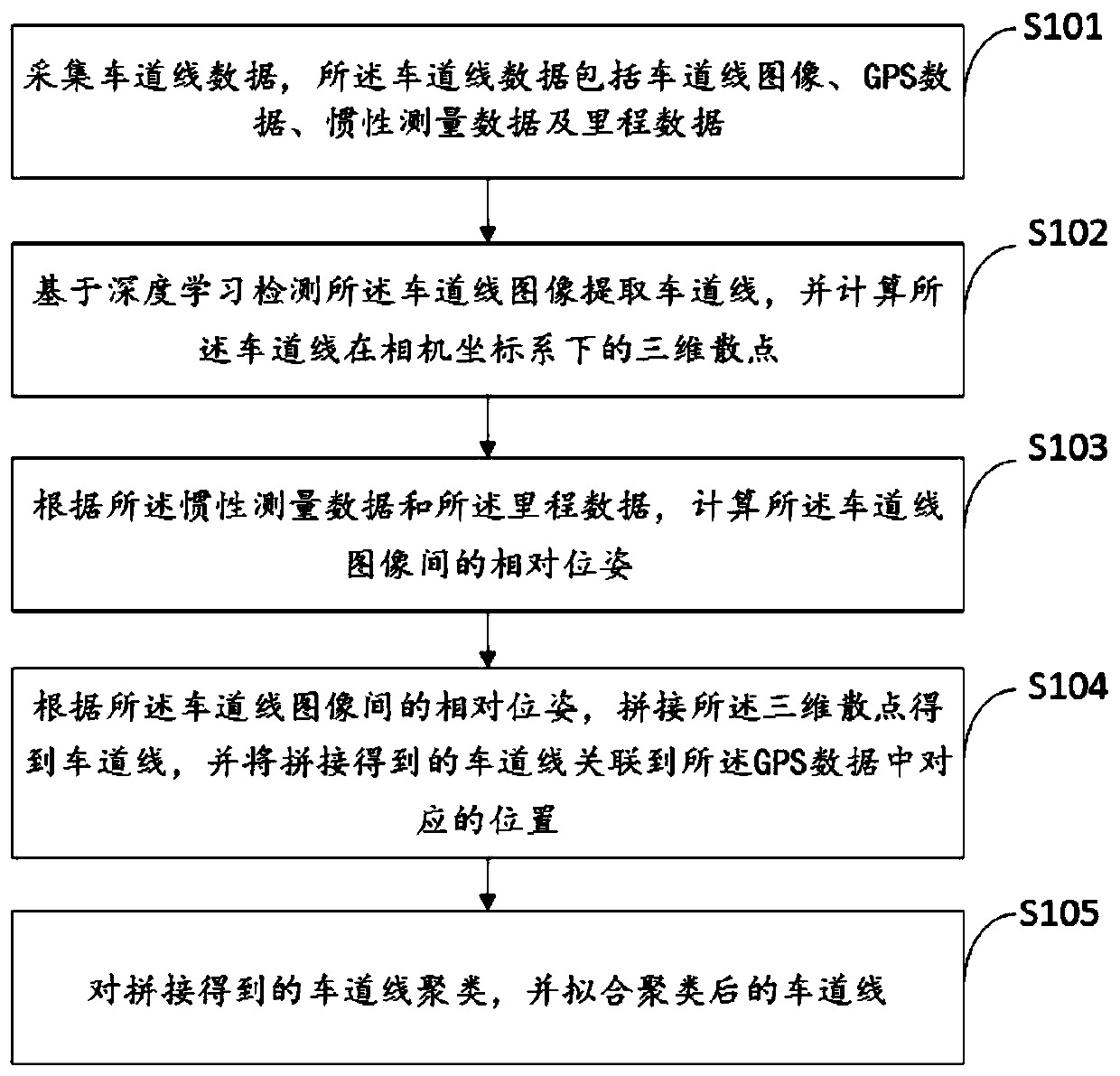
[0026] see figure 1 , a schematic flowchart of a lane line drawing method provided in an embodiment of the present invention, including:
[0027] S101. Collect lane line data, where the lane line data includes lane line images, GPS data, inertial measurement data, and mileage data;
[0028] The lane line image is a lane image captured by a vehicle-mounted camera, and the lane contains clearly identifiable lane lines. The inertial measurement data is the measurement data in the IMU (Inertial Measurement Unit, Inertial Measurement Unit), which can obtain vehicle roll, pitch and yaw data, and at the same time facilitate the extraction of vehicle speed and acceleration. The mileage data is the body odometer measurement data. The lane line images, GPS data, inertial measurement data, and mileage data can all be collected by cheap equipment or sensors, and there is no high requirement for data measurement accuracy.
[0029] Further, collect the lane line image, the inertial measu...
Embodiment 2
[0051] figure 2 A schematic structural diagram of a lane drawing device provided in Embodiment 2 of the present invention, including:
[0052] A collection module 210, configured to collect lane marking data, the lane marking data including lane marking images, GPS data, inertial measurement data and mileage data;
[0053] Optionally, the collection of lane line data also includes:
[0054] Collecting the lane line image, the inertial measurement data, and the mileage data, and adding a time stamp based on the GPS data collection time to the lane line image, the inertial measurement data, and the mileage data.
[0055] The extraction module 220 is used to detect the lane line image based on deep learning to extract the lane line, and calculate the three-dimensional scatter point of the lane line in the camera coordinate system;
[0056] Optionally, the calculation of the three-dimensional scatter points of the lane line in the camera coordinate system is specifically:
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com