Humanoid manipulator control system based on in-depth learning and control method thereof
A deep learning and control system technology, applied in the deep learning-based humanoid manipulator control system and its control field, can solve problems such as inability to adapt to changing environments and poor scalability, and achieve the effect of intelligent improvement of manipulator control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with specific examples.
[0031] Such as figure 1 As shown, the deep learning-based humanoid manipulator control system provided in this embodiment includes:
[0032]The image acquisition module is used to realize the image acquisition and image preprocessing functions of the working scene;
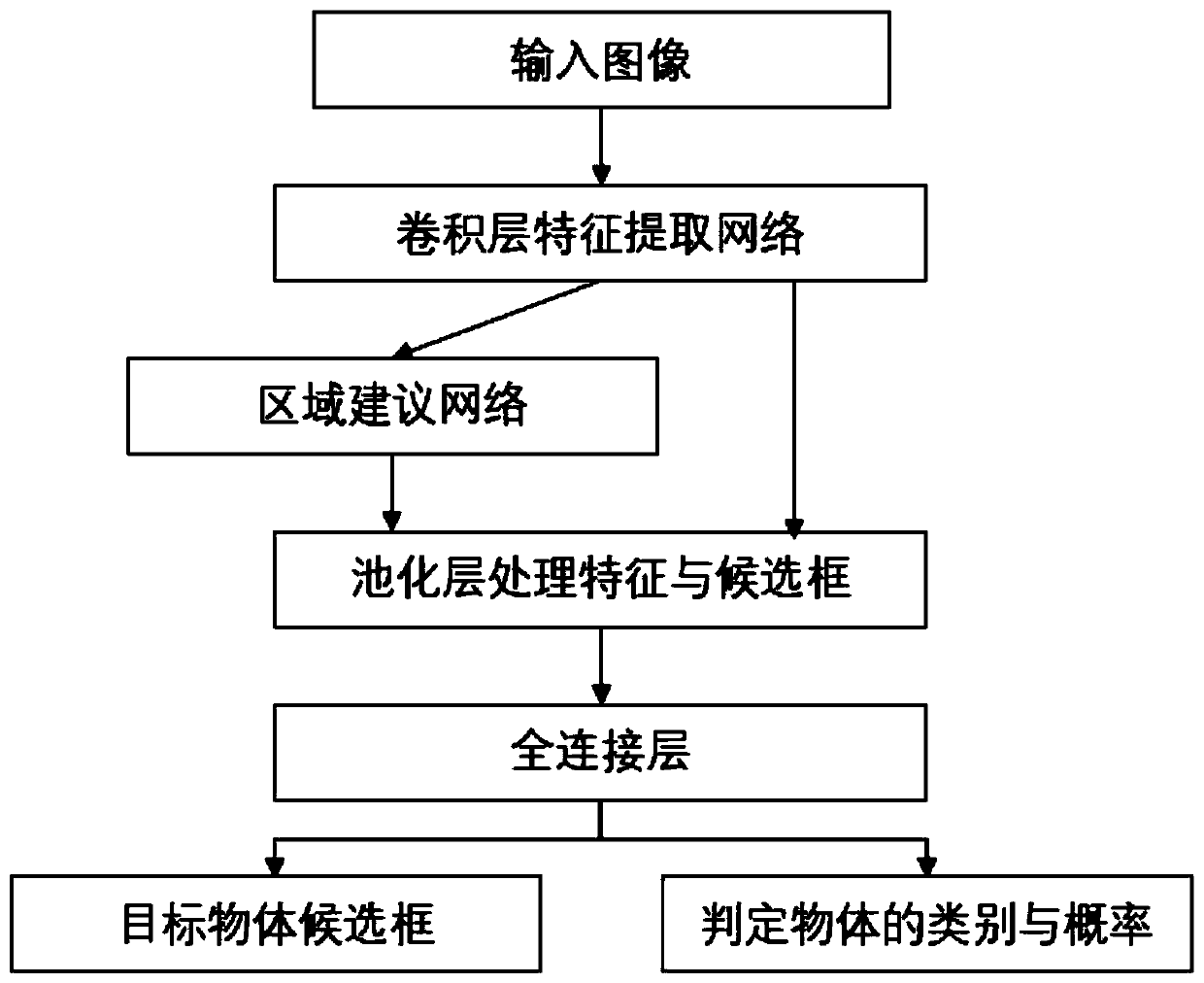
[0033] The object detection and recognition module is used to detect the target object in the collected image and identify the corresponding category;
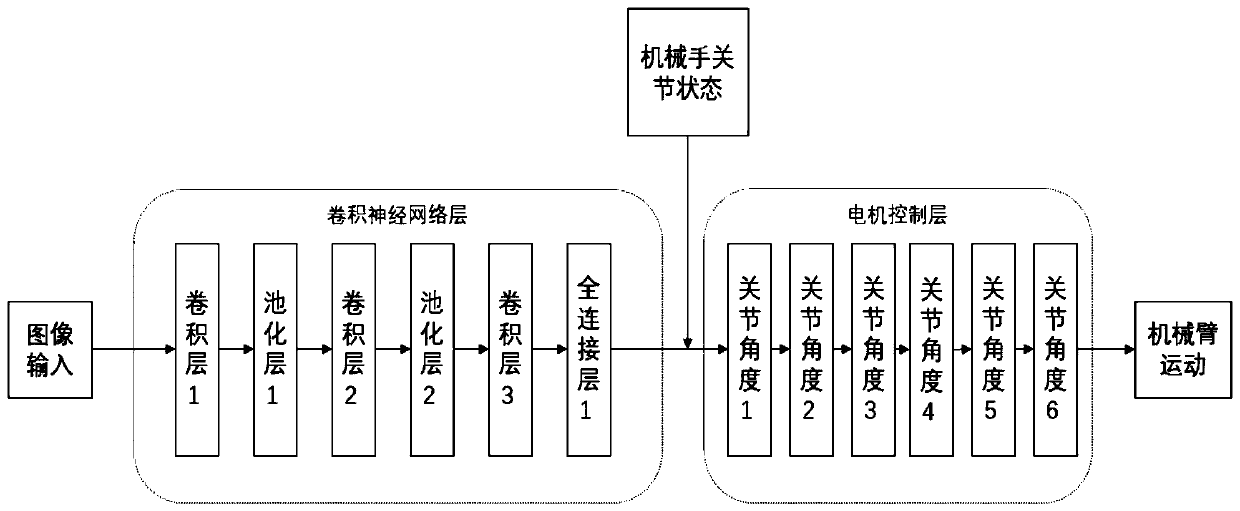
[0034] The humanoid manipulator control decision-making module is used to realize the motion trajectory planning of the humanoid manipulator. According to the processing results of the above two modules, the motion decision is made on the position of the target object and the self-learning of the motion trajectory is realized.
[0035] The image acquisition module utilizes Kinect v2 as the main computer vision module to perform image acquisition work, obtain RGB...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com