Ship path tracking control method for uncertain systems
A technology of path tracking and control methods, applied in general control systems, two-dimensional position/course control, vehicle position/route/altitude control, etc., can solve problems such as uncertainty, uncertain system parameters, interference, etc., to achieve guaranteed Tracking performance, effect of high-precision trajectory tracking control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
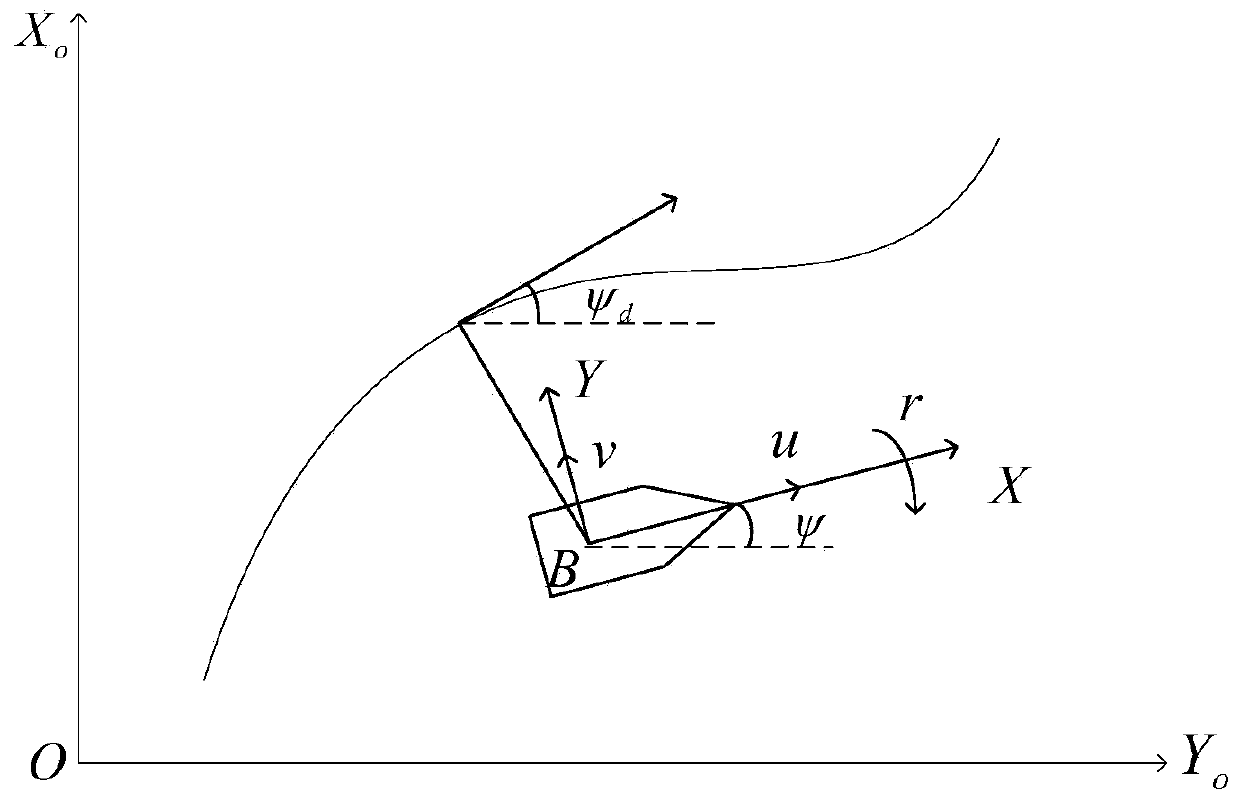
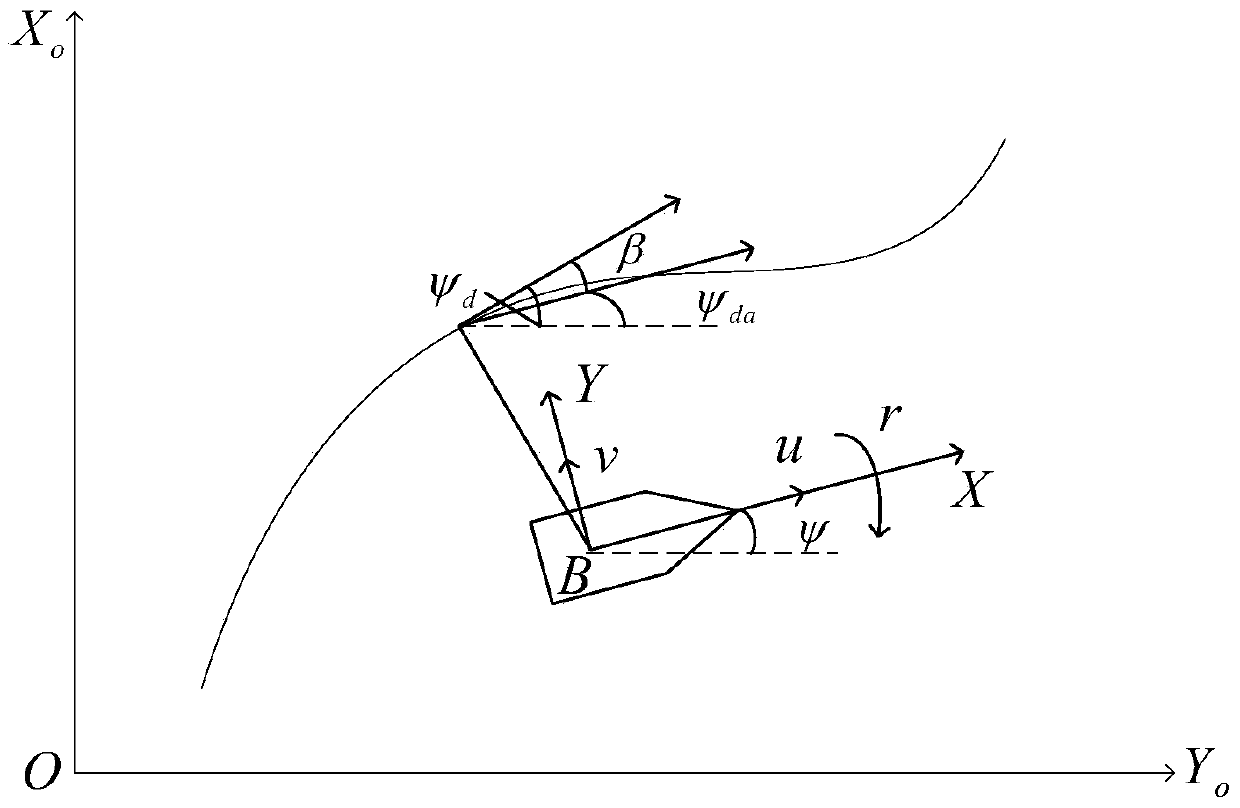
[0044] The invention proposes a ship path tracking control method for an uncertain system, which simultaneously solves the problems of external interference, model uncertainty and uncertain system parameters. Starting from describing the mathematical model of the ship, considering the influence of the actual non-zero drift angle on the course angle during the tracking process, introducing an adaptive law to solve the uncertainty and interference problems, and combining the controller design based on the backstepping method to ensure the tracking performance . Include the following steps:
[0045] Step 1. Establish a 3-DOF underactuated ship mathematical model;
[0046] Ship motion is generally described by six independent variables: surge, sway, heave, roll, pitch, and yaw. Therefore, the ship control can be simplified from six degrees of freedom to motion problems only in the directions of pitch, roll and yaw. Therefore, the three-degree-of-freedom ship mathematical model g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com