Vehicle positioning method and system based on dual-antenna GNSS heading and wheel speed assistance
A vehicle positioning and dual-antenna technology, applied in satellite radio beacon positioning systems, radio wave measurement systems, measurement devices, etc., can solve problems such as GNSS signals are susceptible to interference, high sensor performance requirements, and environmental feature point distribution. , to achieve accurate estimation, improve estimation accuracy, and eliminate cumulative errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0042] The present invention will be described in detail below with reference to the drawings and specific embodiments. Obviously, the described embodiments are a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by a person of ordinary skill in the art without creative work shall fall within the protection scope of the present invention.
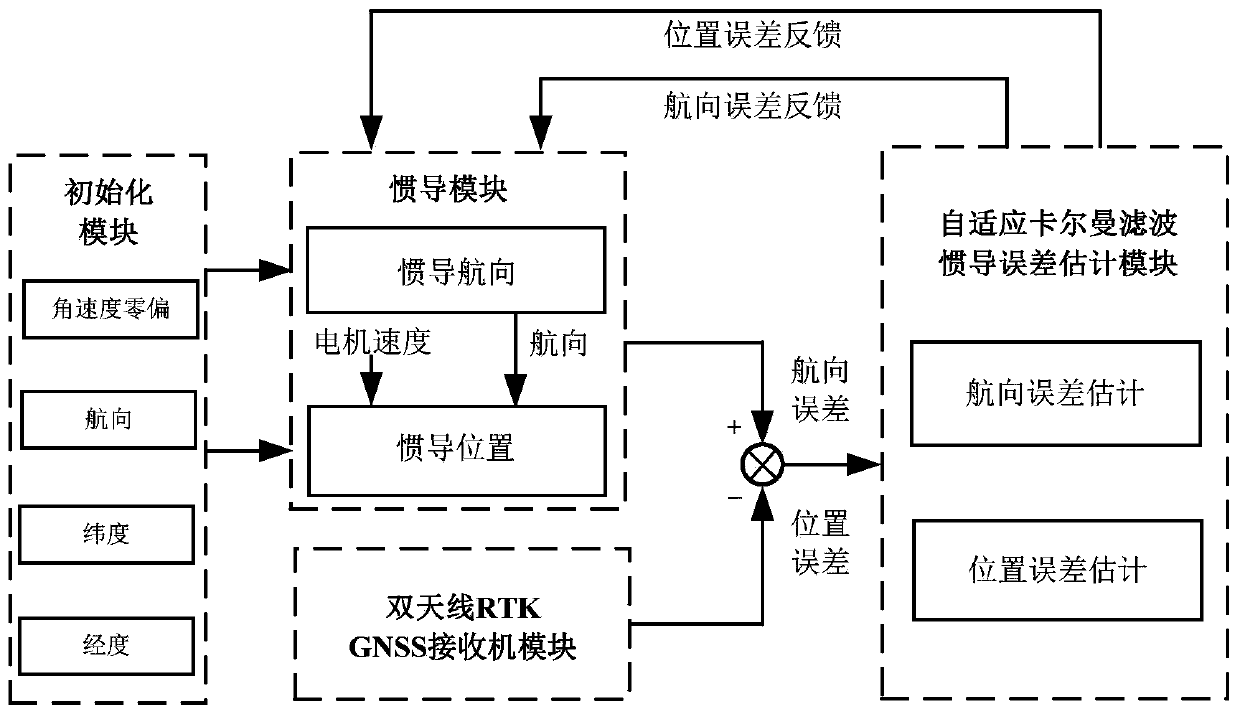
[0043] Such as figure 1 As shown, the present invention relates to a vehicle positioning method based on dual-antenna GNSS heading and wheel speed assistance. The method includes the following steps:
[0044] Step 1. When the vehicle is stationary, within a period of time (about 20-30 seconds), calculate the initial value of the position and heading based on the GNSS antenna position and heading. The calculation method is as follows:
[0045]
[0046]
[0047]
[0048]
[0049] Where L ini , Λ ini And ω ini Respectively indicate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com