Multi-modal interaction rehabilitation robot training system for hemiplegia upper-limb compensatory movement
A rehabilitation robot and compensatory motion technology, applied in the field of rehabilitation robot training system, can solve the problems of lack of monitoring and evaluation mechanism of hemiplegic upper limbs, decreased motor function, asymmetry of motor movements, etc., and achieve the effect of monitoring, evaluation and inhibition.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0044] The specific implementation of the present invention will be further described below in conjunction with the accompanying drawings and examples, but the implementation and protection of the present invention are not limited thereto. It should be pointed out that, if there are any processes in the following that are not specifically described in detail, those skilled in the art can realize or understand with reference to the prior art.
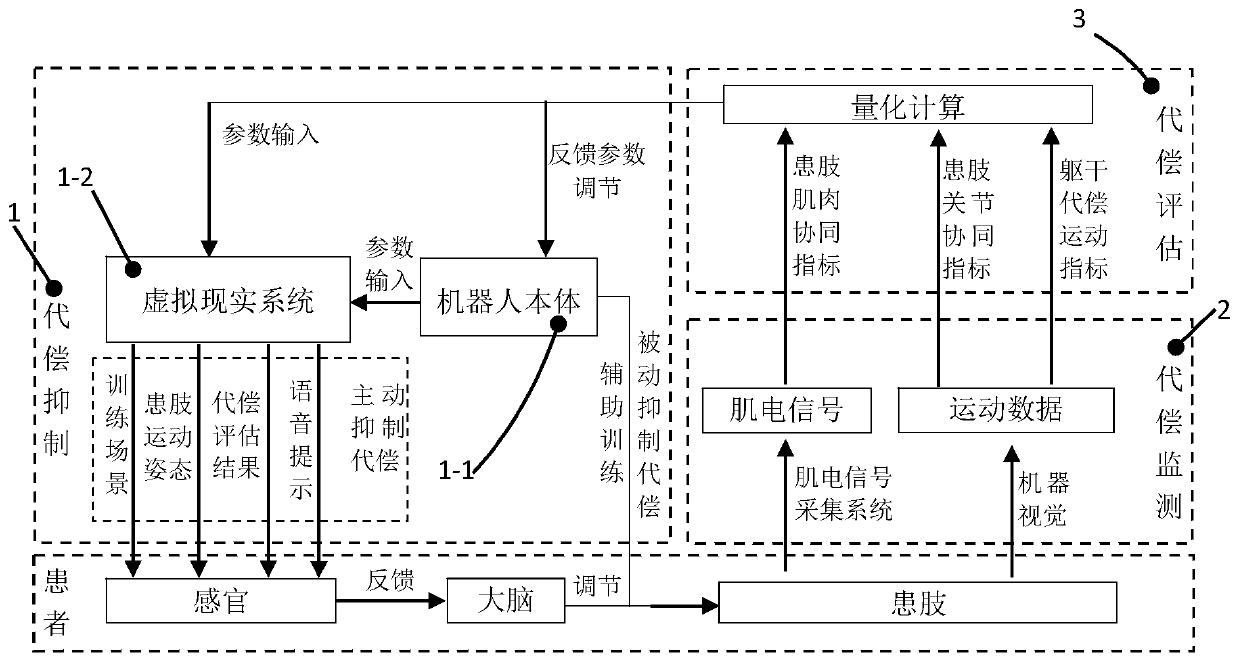
[0045] like figure 1 As shown, a rehabilitation robot training system with multimodal interaction of hemiplegic upper limb compensatory movement, the upper limb rehabilitation robot training system includes a hemiplegic upper limb compensatory movement inhibition module 1, a compensation monitoring module 2 and a compensation evaluation module 3;
[0046] The hemiplegic upper limb compensatory movement inhibition module 1 includes two parts: a robot body 1-1 and a virtual reality system 1-2; the robot body module 1-1 has at least 6 degre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com