Flexible driver for imitating skeletal muscle variable-rigidity distribution
A flexible actuator and variable stiffness technology, applied in the field of bionic engineering, can solve the problems of small actuator driving force, poor durability, neglect of skeletal muscle stiffness, etc., and achieve the effect of increasing endurance, improving driving force, and promoting contraction function
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The technical solutions in the embodiments of the present invention will be clearly and completely described below. Obviously, the described embodiments are only some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
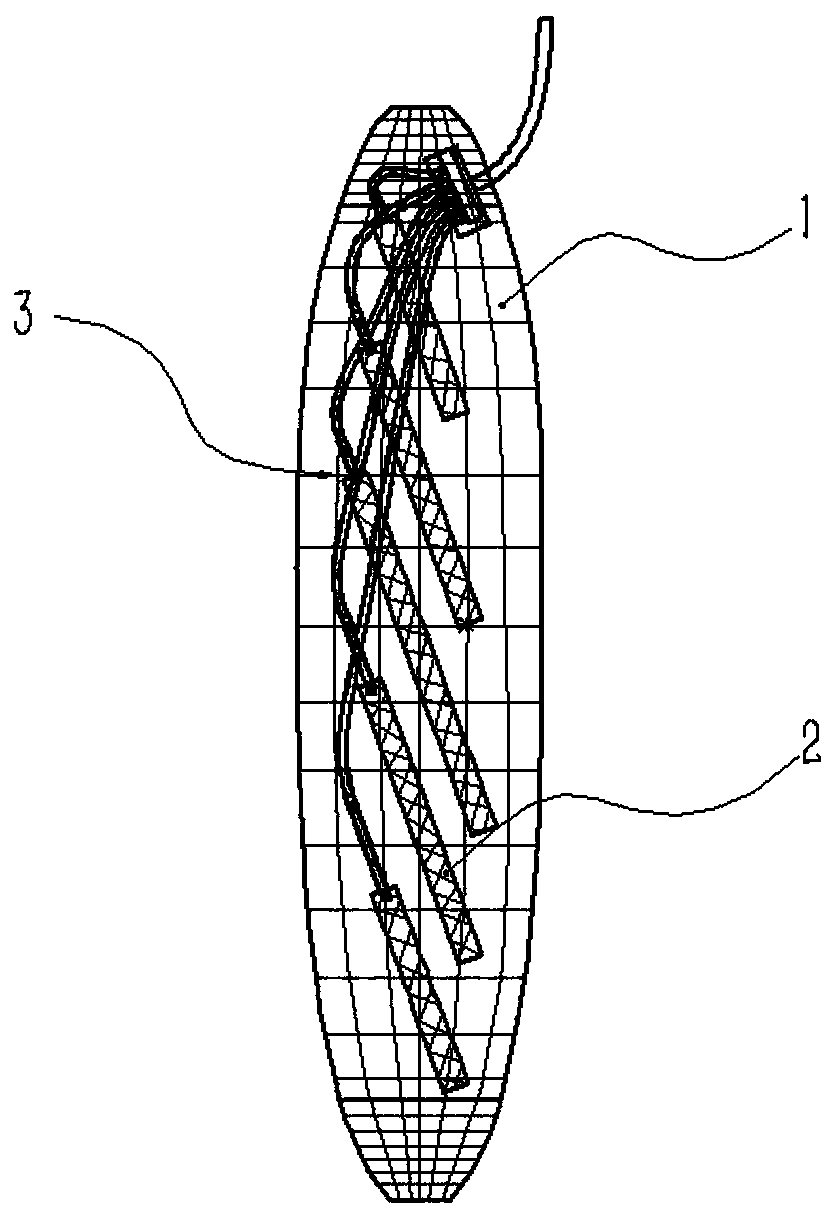
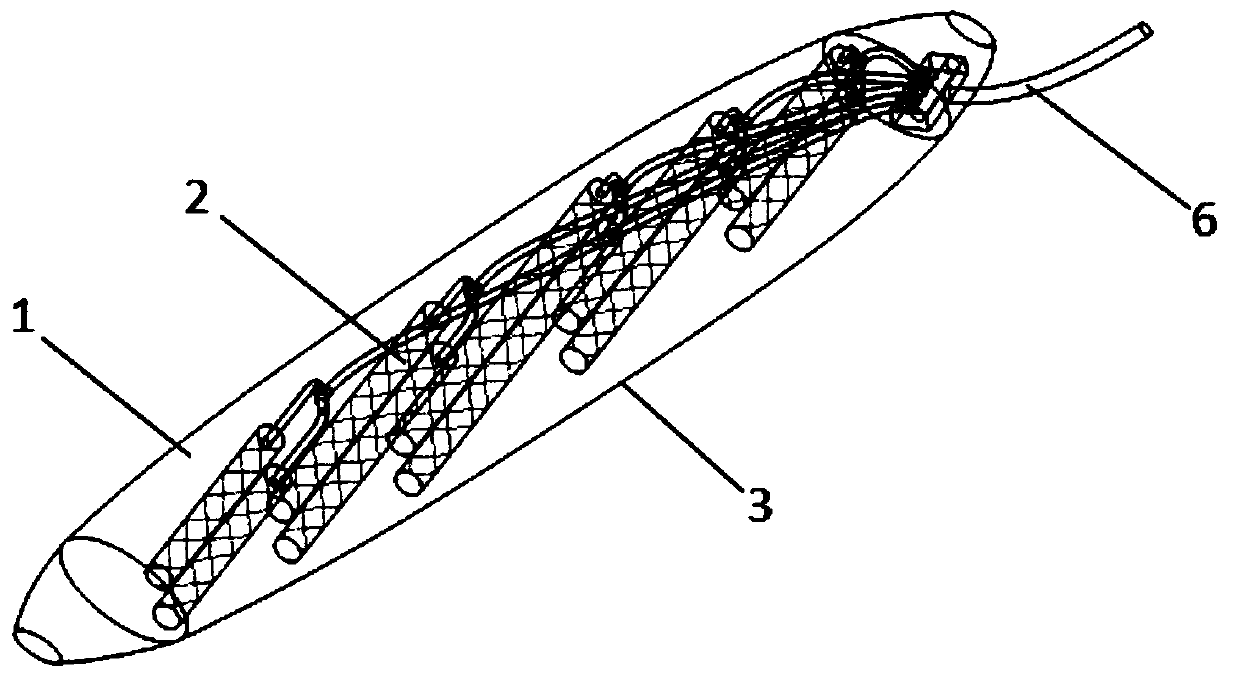
[0034] The embodiment of the present invention discloses a flexible actuator that simulates the variable stiffness distribution of skeletal muscle, including:
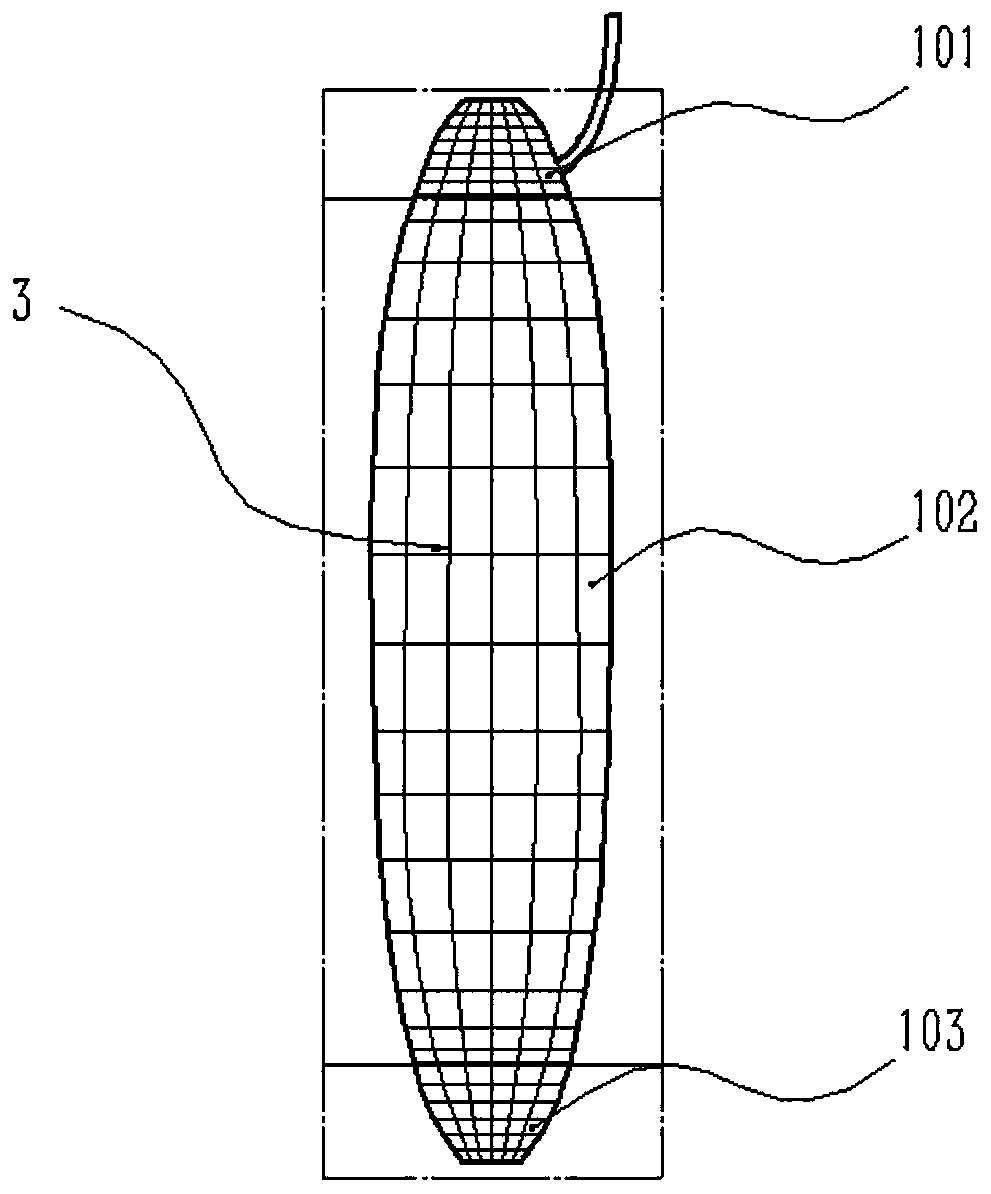
[0035] Matrix 1, said matrix 1 is made of elastic material, and it includes upper, middle and lower three sections, which are respectively upper section matrix 101, lower section matrix 103 and middle section matrix 102, and its interior defines a plurality of accommodation cavities from top to bottom, said Multiple accommodation chambers are arranged in parallel;
[0036] ...
PUM
| Property | Measurement | Unit |
|---|---|---|
| The inside diameter of | aaaaa | aaaaa |
| Outer diameter | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com