Light-weight multi-freedom degree shoulder complex bionic power-assisted flexible exoskeleton
A degree of freedom and complex technology, applied in gymnastics equipment, sports accessories, passive exercise equipment, etc., can solve the problems of human-machine shoulder movement singular configuration, reducing control accuracy and stability, and increasing driving performance requirements. , to achieve the effect of improving the range of rehabilitation motion, realizing lightweight design, and improving human-machine motion compatibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be described in further detail below in conjunction with the accompanying drawings.
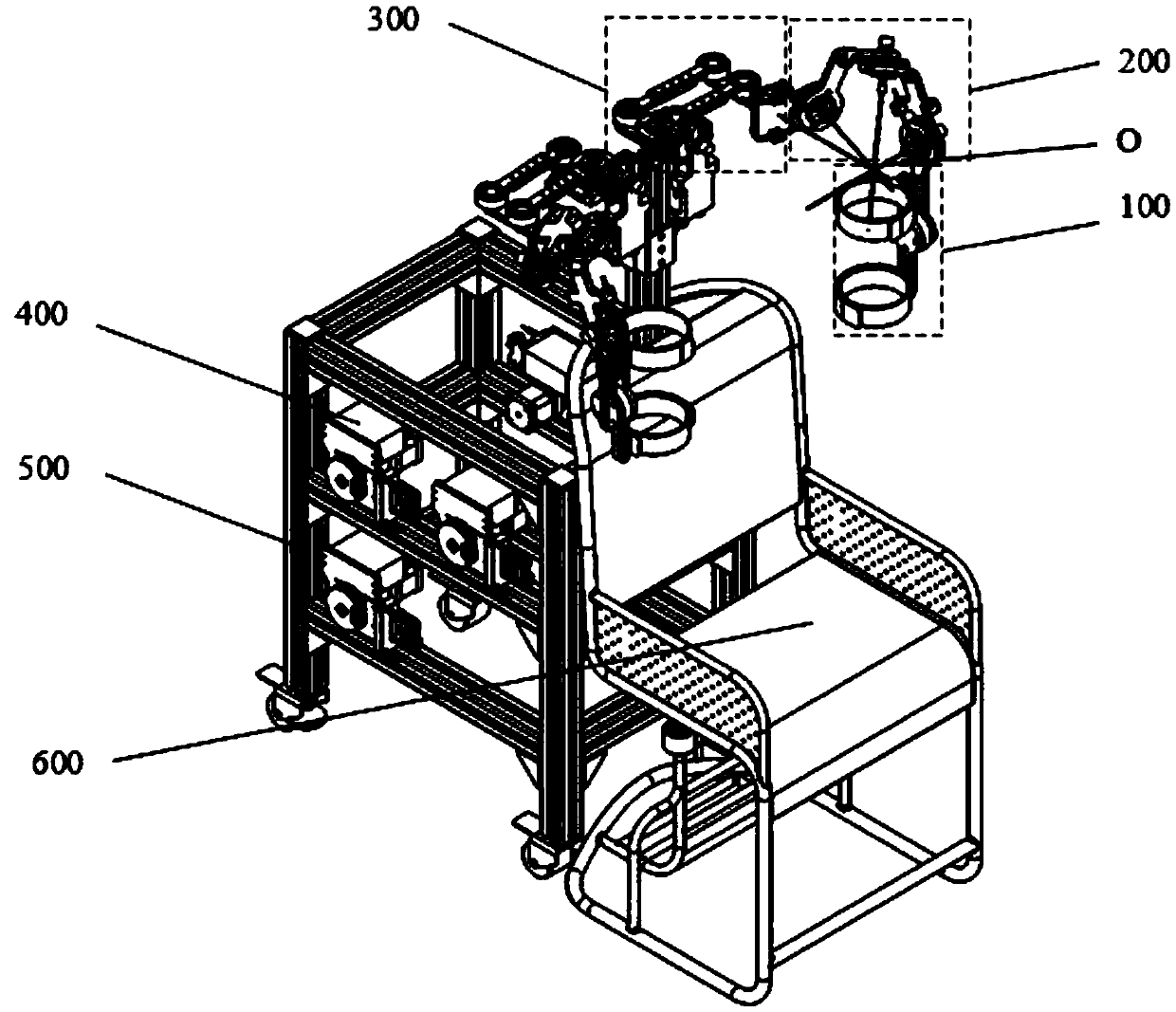
[0046] like figure 1 As shown, the present invention includes a base assembly 500 as an installation basis. The two sides of the upper part of the base assembly 500 have the same structure, and each side includes an upper arm fixation assembly 100 , a glenohumeral joint movement assembly 200 and a shoulder girdle movement assembly 300 .
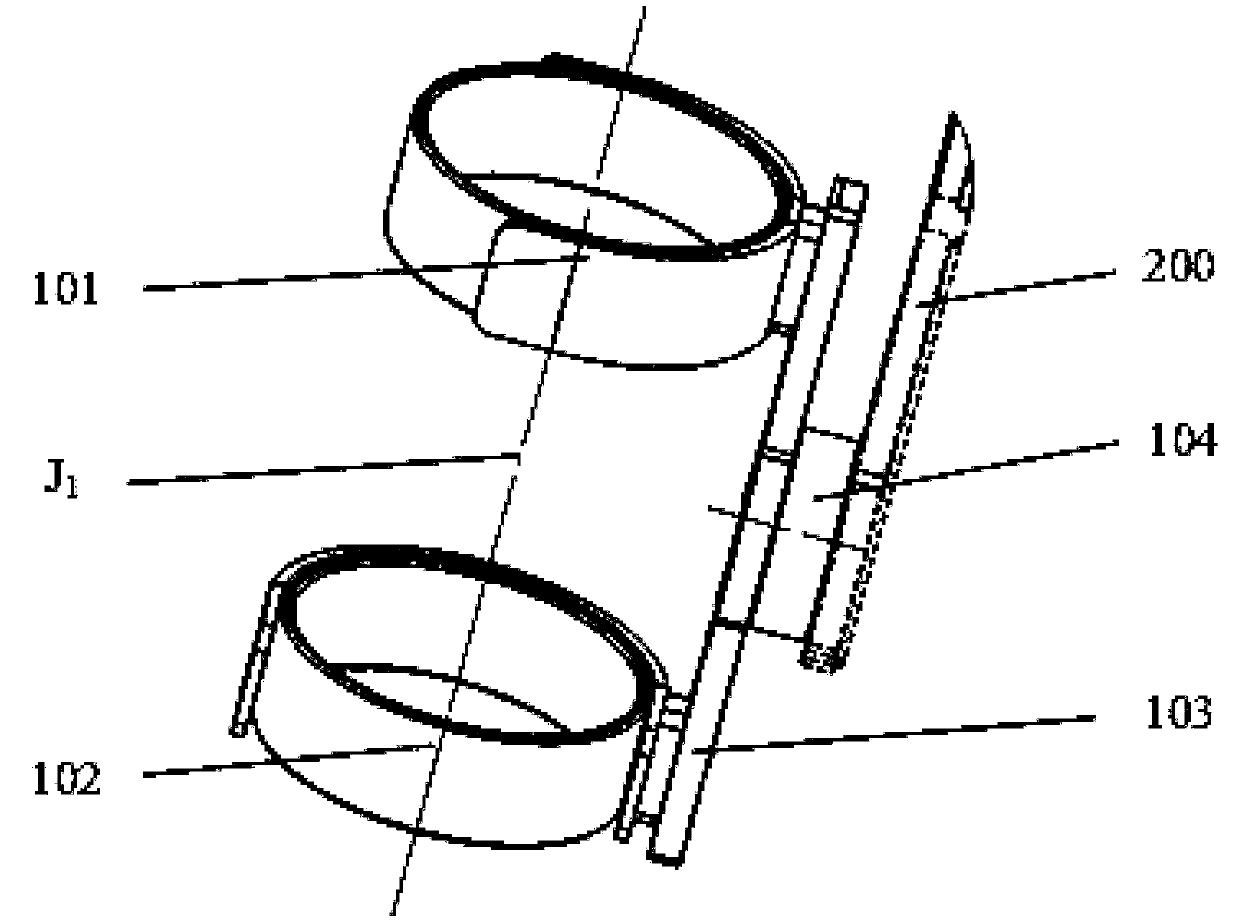
[0047] like figure 2 As shown, the upper arm fixation assembly 100 includes an upper arm holder 101, a soft restraint belt 102, an upper arm support rod 103 and a multi-dimensional force sensor 104, and the two ends of the upper arm support rod 101 are respectively connected with an upper arm holder 101, and the upper arm holder 101 is half-shaped. It is circular, with a soft restraint belt 102 attached to the inner side. The soft restraint belt 102 is in direct contact with the upper arm of the human body, which can impro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com