A three-dimensional reconstruction method based on point cloud optimization sampling
A 3D reconstruction and point cloud technology, applied in the field of computer vision graphics, can solve the problems of high calculation cost, disparity map stripes, and only retaining, etc., to improve the calculation speed, avoid the stripe phenomenon, and shorten the optimization range.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0044] In order to make the purpose, technical solution and advantages of the present invention more clear, the specific implementation of the present invention will be further described below in conjunction with the accompanying drawings, but the method of the present invention is not limited.
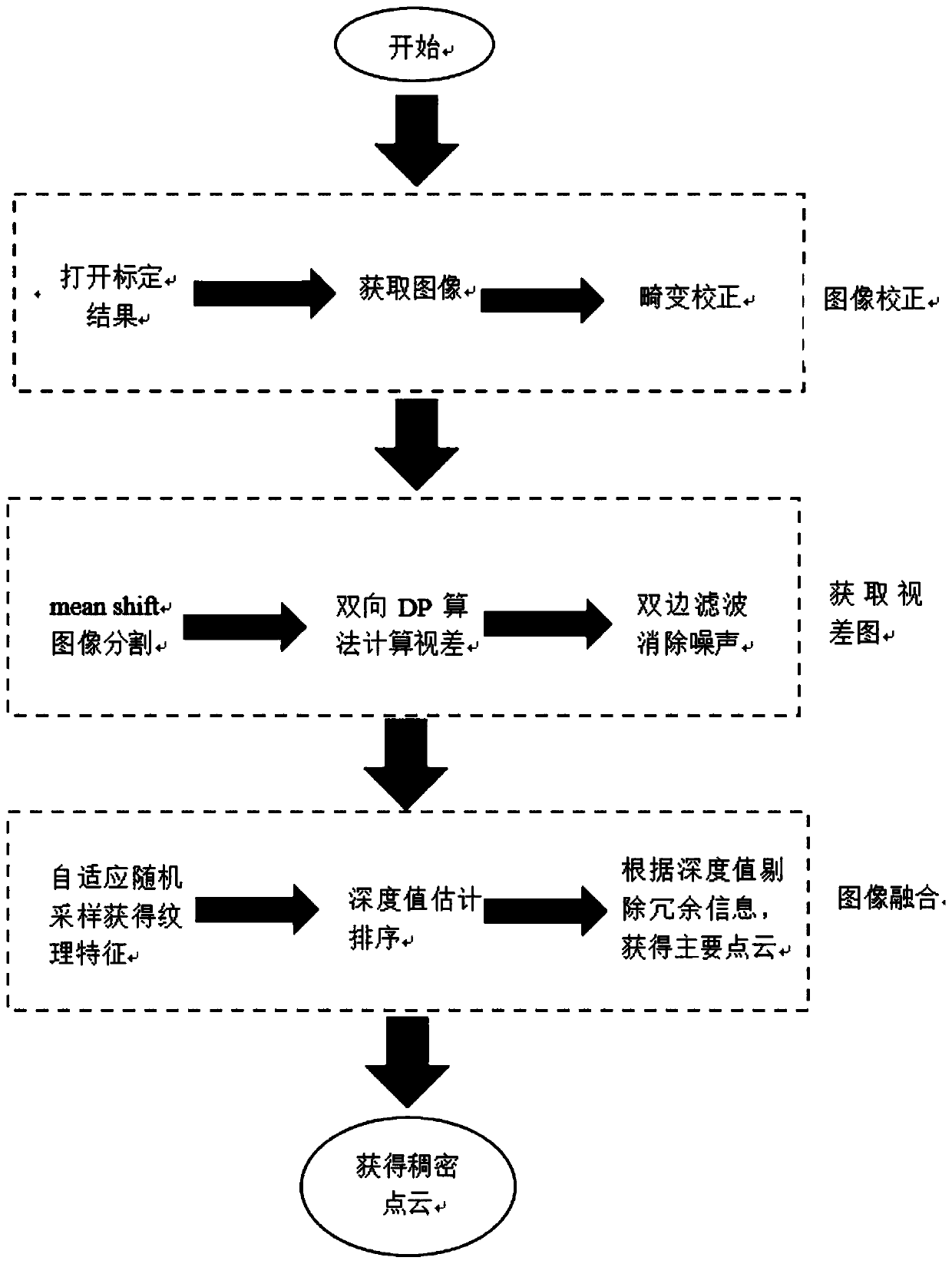
[0045] The greatest contribution of the method of the present invention lies in the formation of a set of efficient 3D reconstruction process through the improved two-way DP algorithm, self-adaptive sampling, depth value estimation and sorting, etc., while extracting the main texture features, the redundant information is obviously reduced, and the The speed of reconstruction is improved, which has great significance in the field of three-dimensional reconstruction.
[0046] The flow of the method of the present invention can be divided into three sub-modules, distortion correction is performed on images collected by multiple cameras at the same time, stereo matching is performed on th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com