A lane line detection method in a complex driving scene
A lane line detection and driving scene technology, applied in the field of lane line detection, can solve the problems of difficult lane line recognition methods and limited information, and achieve the effects of overcoming road shadows, high-precision detection, and improving adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
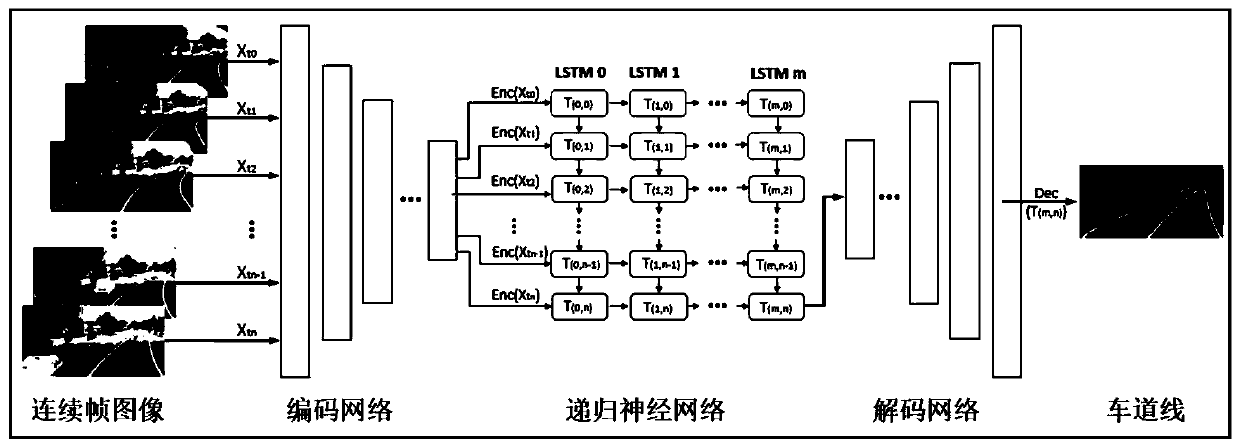
[0031] The traditional method mainly uses a single image to detect lane lines. When faced with complex driving scenes such as high curvature of lane lines, strong shadows on the road surface, and lane lines blocked by car bodies, the detection effect is poor. The invention proposes a lane line detection method in a complex driving scene. This method uses continuous multi-frame driving scene images to detect lane lines in the current frame, and uses a deep learning network to construct a lane line semantic segmentation model to achieve stable and accurate lane line detection.
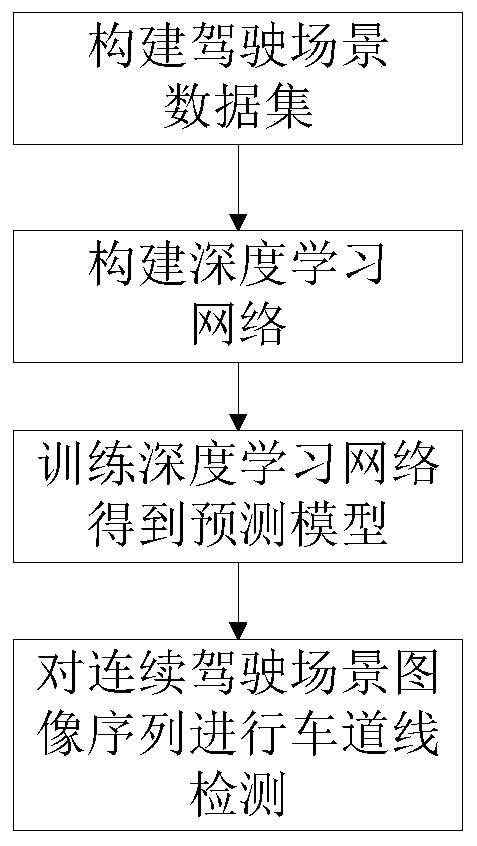
[0032] The method provided by the present invention designs a novel deep learning network model, and its overall structure can be found in figure 1 . Its specific embodiment comprises the following steps:
[0033] Step S1, constructing an image data set, each sample in the data set includes N frames of continuous road scene images. The specific implementation process is described as follows:
[0034]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com