An Altitude Control Method for Quadrotor UAV with Improved Active Disturbance Rejection
A four-rotor unmanned aerial vehicle, height control technology, applied to controllers with specific characteristics, electric controllers, etc., can solve the problems of less active disturbance rejection controllers, complex nonlinear structures, and unsuccessful applications, and achieve The effect of overcoming the lack of anti-interference ability, improving the anti-interference ability, and excellent robust and stable performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In order to make the purpose, technical solutions and advantages of the present invention clearer, the present invention will be further described below in conjunction with accompanying drawings, simulation experiments and actual flight experiments.
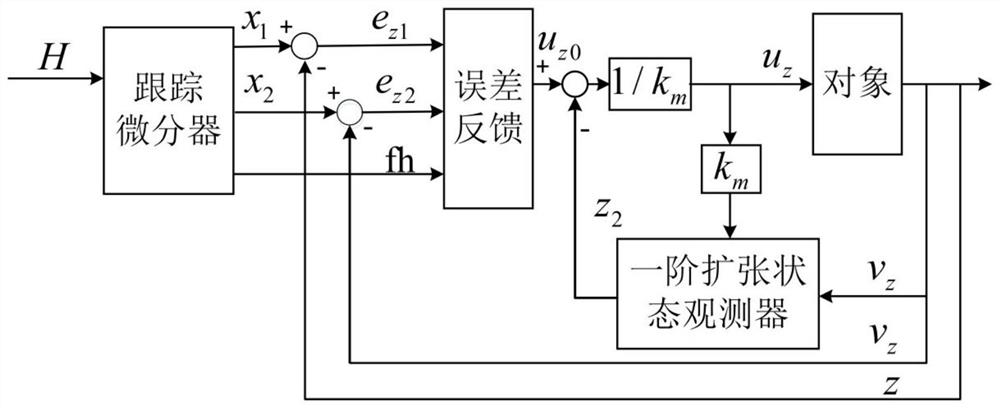
[0043] Such as figure 1 As shown, the height control method of a quadrotor unmanned aerial vehicle for improving self-disturbance provided by the present invention is carried out according to the following steps:
[0044] Firstly, based on the mechanism modeling method, the nonlinear dynamic model of the quadrotor UAV in the height direction is established. Its mathematical expression is:
[0045]
[0046] The model takes into account the nonlinear structure of the system and external disturbances, and describes the actual flight conditions more accurately. model, It can be regarded as the control input in the direction of height, and it is also the lift that the four rotors of the UAV can provide, b is the lift coeff...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com