Aerial image splicing method for an unmanned aerial vehicle
An image stitching and aviation technology, applied in the field of image processing, can solve the problems of low stitching efficiency and low robustness, and achieve the effects of improving robustness and stitching efficiency, simple calculation, and improving accuracy and precision.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
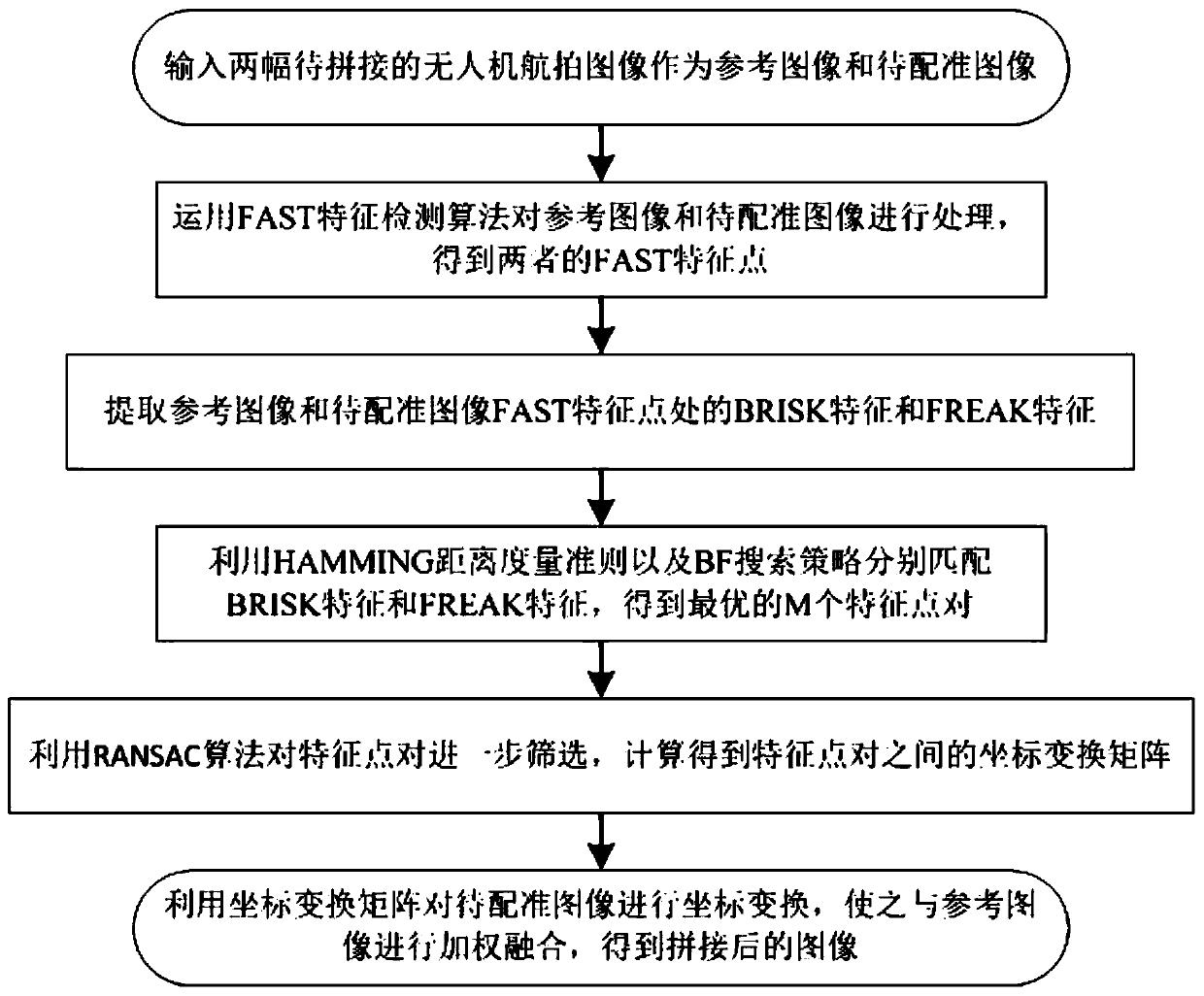
[0061] Such as figure 1 As shown, the present embodiment provides a method for splicing aerial images of drones, including the following steps:
[0062] S1: if figure 2 and image 3 As shown in , input two unmanned aerial vehicle images to be spliced as reference images f 1 (x,y) and the image to be registered f 2 (x,y);
[0063] S2: Using the FAST feature point detection algorithm for the reference image f 1 (x,y) and the image to be registered f 2 (x, y) are processed to obtain the reference image f respectively 1 (x,y) and the image to be registered f 2 FAST feature points of (x,y), such as Figure 4 and Figure 5 shown;
[0064] S3: Extract the reference image f respectively 1 (x,y) and the image to be registered f 2 (x, y) BRISK feature and FREAK feature at the FAST feature point;
[0065] S4: Use the HAMMING distance measure criterion and the BF search strategy to search the reference image f 1 (x,y) and the image to be registered f 2 Match the BRISK an...
Embodiment 2
[0069] This embodiment is further optimized on the basis of Embodiment 1, specifically:
[0070] Said S2 specifically includes the following steps:
[0071] S2.1: For the reference image f 1 (x,y) and the image to be registered f 2 For each pixel on (x, y), calculate the gray value difference between it and the gray value of w pixels on a circle with a radius of r and the pixel as the center in the surrounding z×z neighborhood;
[0072] S2.2: Judging the difference between the gray values, if there are at least continuous If the absolute value of the difference between gray values exceeds the preset threshold, the pixel is a FAST feature point, and then the non-maximum value suppression algorithm is used to remove the redundant FAST feature points, and the FAST of the reference image and the image to be registered is obtained. feature point set P 1 and P 2 ;
[0073] Extracting the reference image f in the S3 1 (x,y) and the image to be registered f 2 (x,y) The BRIS...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com