A hydraulic four-link prosthetic knee joint with active and passive hybrid control
A hybrid control and four-link technology, applied in prosthetics, medical science, artificial legs, etc., can solve the problem of unreliable stability of pneumatic knee joint support performance, high requirements for magnetorheological fluid materials, and inability to provide active torque, etc. problems, to avoid the failure of damping adjustment, to increase battery life, and to achieve the effect of good practicality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the technical means and effects realized by the present invention easy to understand, the present invention will be described in detail below in conjunction with the embodiments and accompanying drawings.
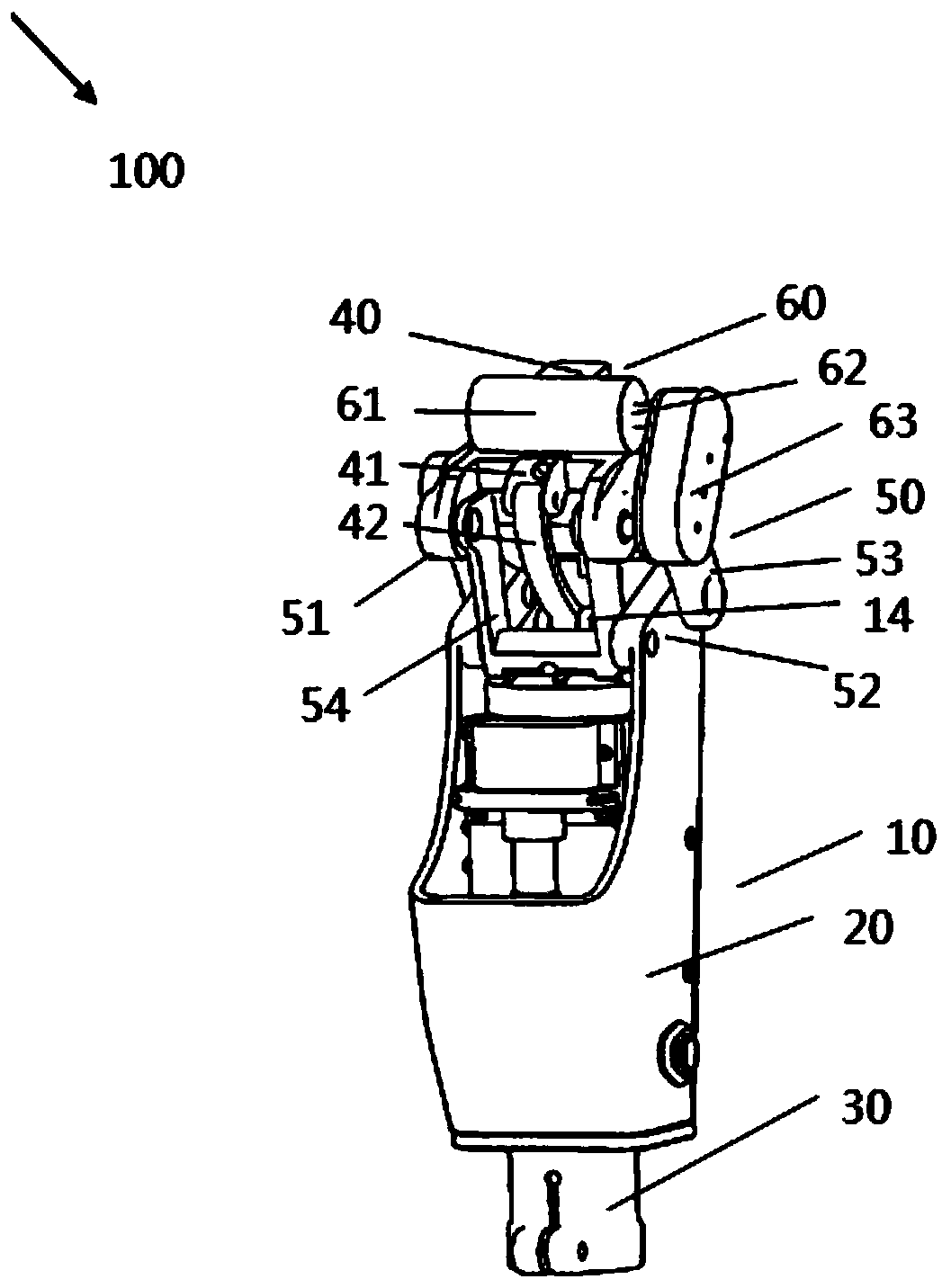
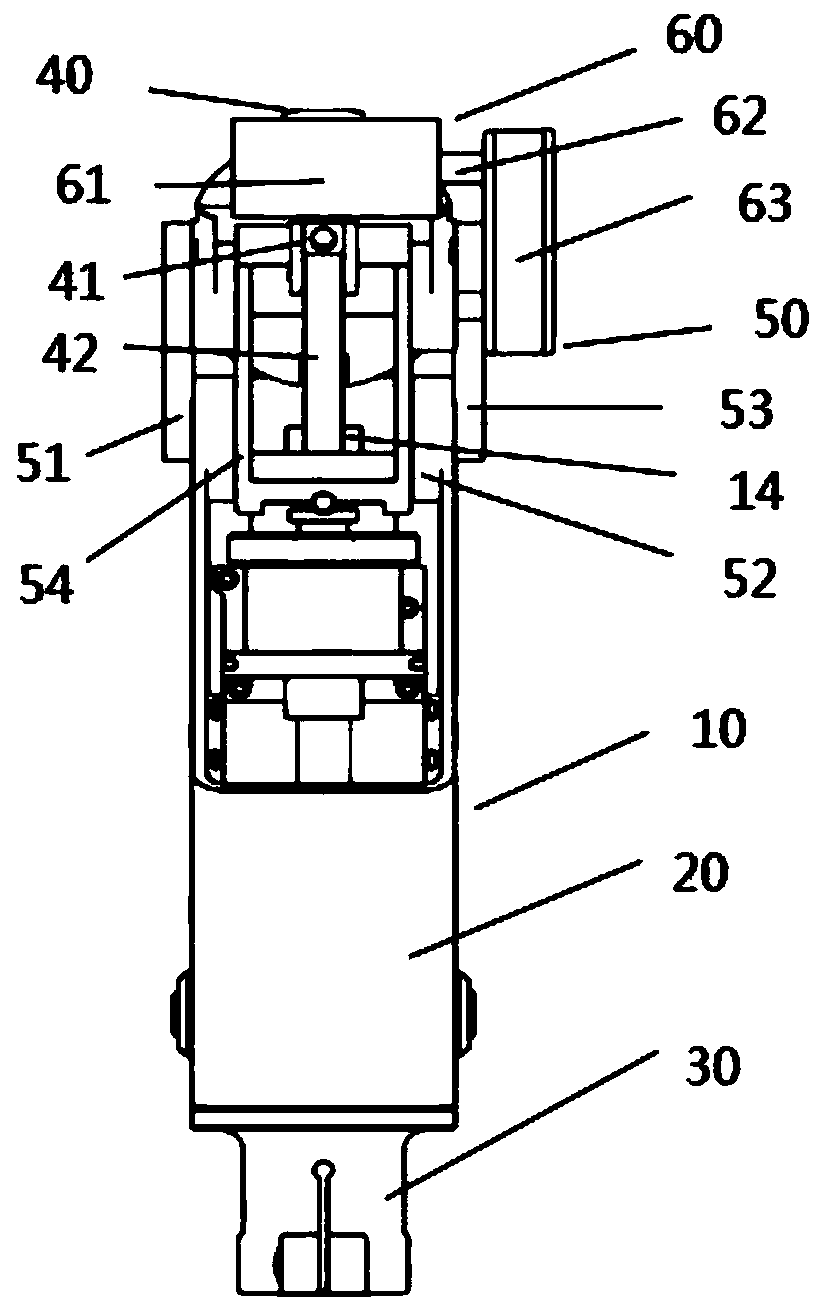
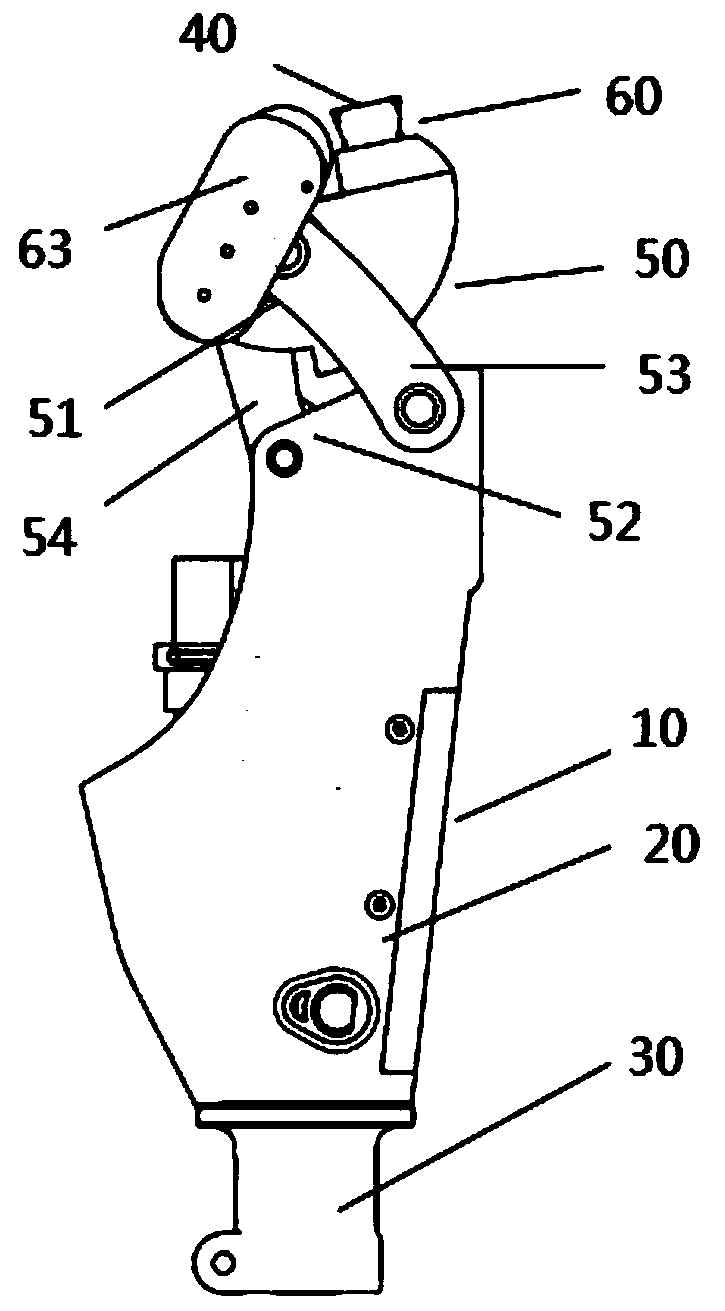
[0021] figure 1 It is an overall schematic diagram of an active-passive hybrid control type hydraulic four-link prosthetic knee joint in an embodiment of the present invention, figure 2 It is a front view of an active-passive hybrid control type hydraulic four-link prosthetic knee joint in an embodiment of the present invention, image 3 It is a right view of an active-passive hybrid control type hydraulic four-link prosthetic knee joint in an embodiment of the present invention.
[0022] like figure 1 , figure 2 and image 3 As shown, an active-passive hybrid control type hydraulic four-bar prosthetic knee joint 100 in this embodiment has a hydraulic damper 10, a damper housing 20, a calf bearing part 30, a thigh bearing part 40, a four-bar li...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com