Robot elevator press key positioning control method and system
A positioning control and robot technology, which is applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of insufficient feature information extraction and low accuracy of positioning control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
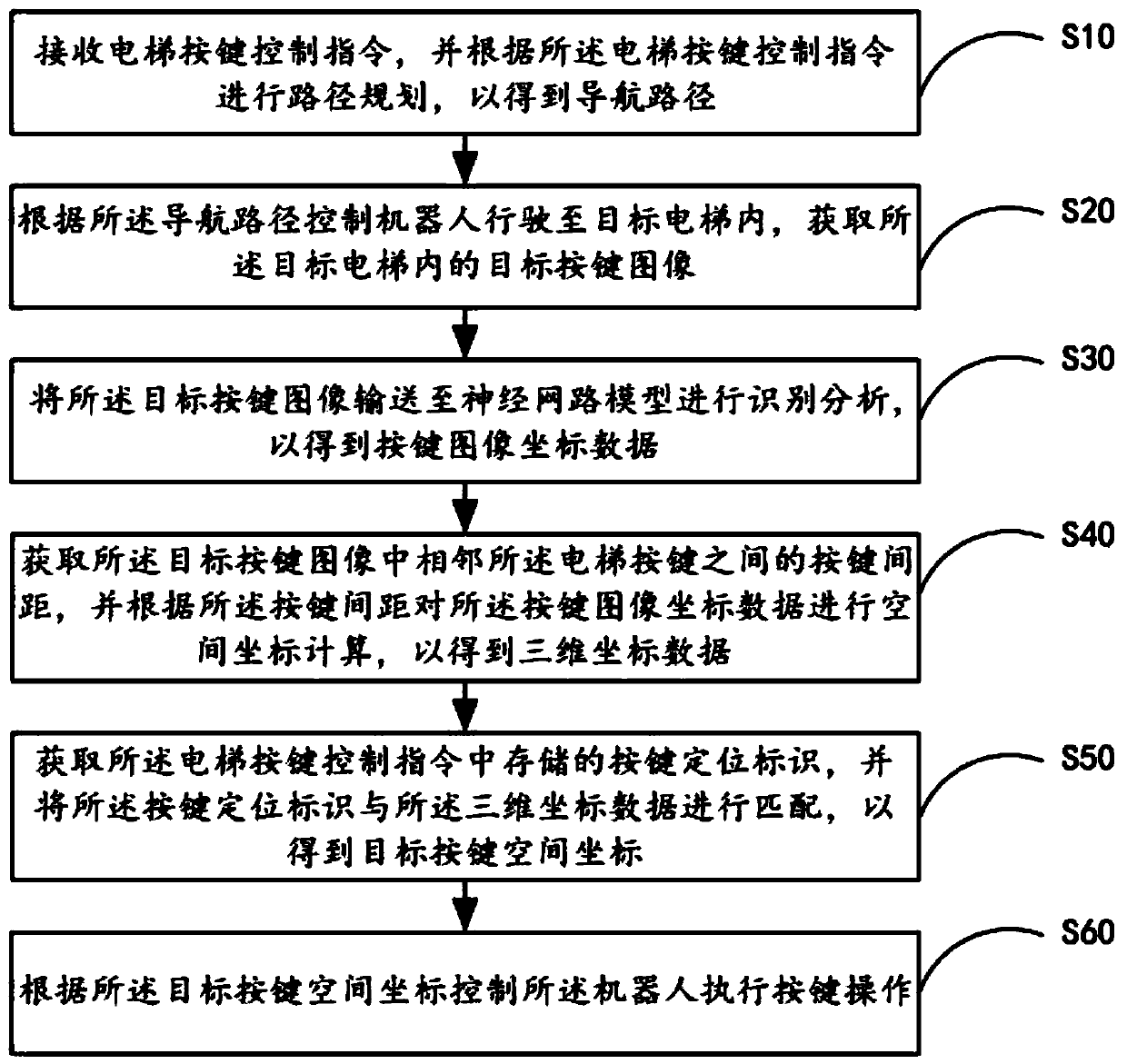
[0052] see figure 1 , is a flow chart of the robot elevator button positioning control method provided in the first embodiment of the present invention, including steps:
[0053] Step S10, receiving the elevator button control instruction, and performing path planning according to the elevator button control instruction, so as to obtain the navigation path;
[0054] Wherein, the elevator button control instruction is transmitted in the form of electric signal, voice signal, wireless signal or button signal, and the elevator button control instruction is used to trigger the robot elevator button positioning control method. Preferably, the elevator A target number is stored in the button control instruction, and the target number is used for identification and control of the robot, and can be targeted to trigger control of the elevator button control instruction for the specified robot;
[0055] Specifically, in this step, the current position information of the robot and the a...
Embodiment 2
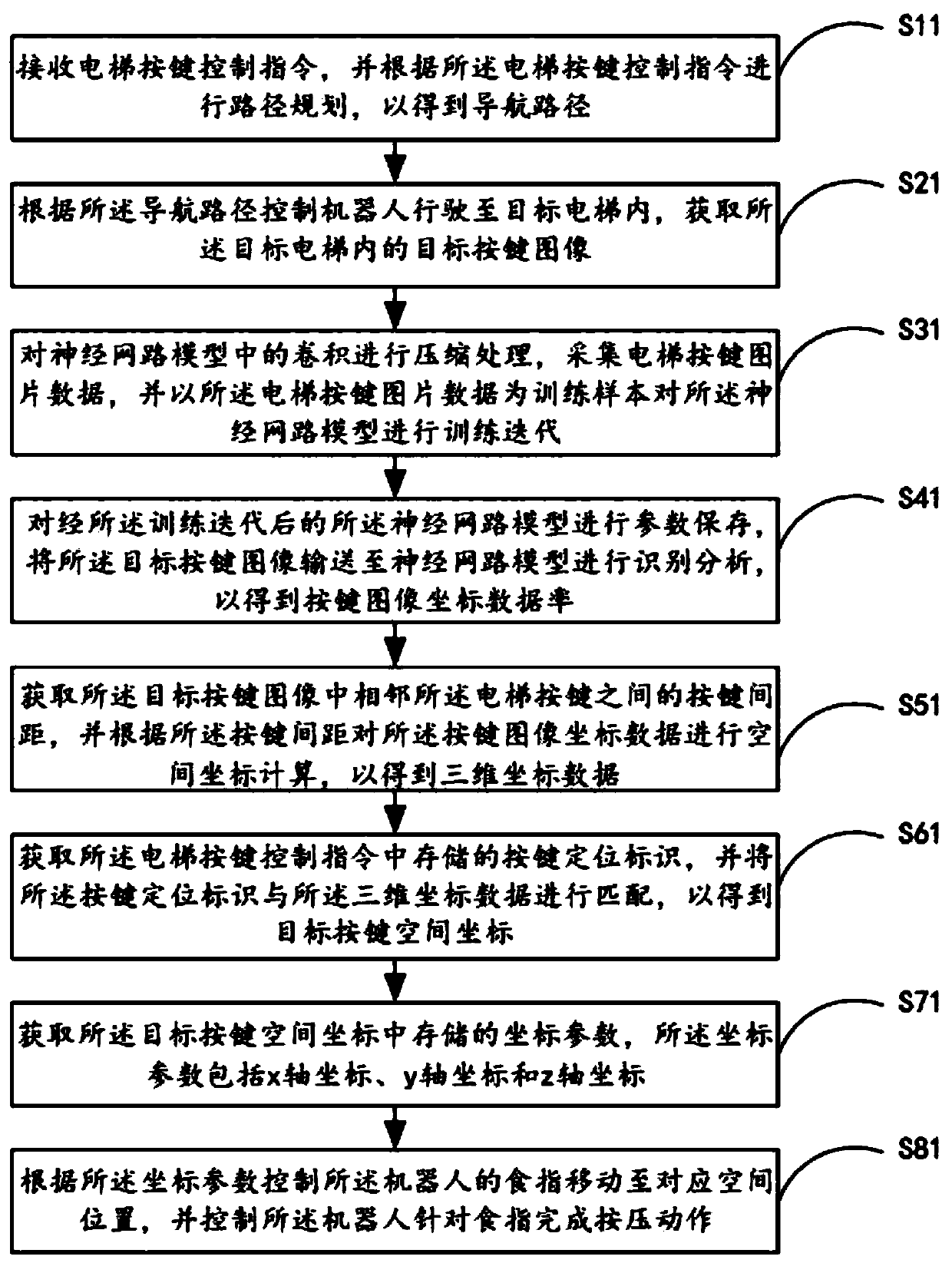
[0068] see figure 2 , is the flow chart of the robot elevator button positioning control method provided by the second embodiment of the present invention, including steps:
[0069] Step S11, receiving the elevator button control instruction, and performing path planning according to the elevator button control instruction, so as to obtain the navigation path;
[0070] Wherein, the elevator button control instruction is transmitted in the form of electric signal, voice signal, wireless signal or button signal, and the elevator button control instruction is used to trigger the robot elevator button positioning control method. Preferably, the elevator A target number is stored in the button control instruction, and the target number is used for identification and control of the robot, and can be targeted to trigger control of the elevator button control instruction for the specified robot;
[0071] Preferably, in this step, the current position information of the robot and the...
Embodiment 3
[0094] see Figure 5 , is a schematic structural diagram of a robot elevator button positioning control system 100 provided in the third embodiment of the present invention, and the system includes:
[0095] The path planning module 10 is used to receive elevator button control instructions, and perform path planning according to the elevator button control instructions to obtain a navigation path, wherein the elevator button control instructions use electrical signals, voice signals, wireless signals or button signals The elevator button control instruction is used to trigger the robot elevator button positioning control method. Preferably, the elevator button control instruction stores a target number, and the target number is used for identification of the robot control, and the trigger control of the elevator button control instruction can be performed on the designated robot; specifically, in this module, through the current position information of the robot and the acqui...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com