Mobile robot trajectory tracking new method based on adaptive sliding mode control
A mobile robot, adaptive sliding mode technology, applied in the direction of adaptive control, general control system, non-electric variable control, etc., can solve problems such as inapplicability to mobile robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
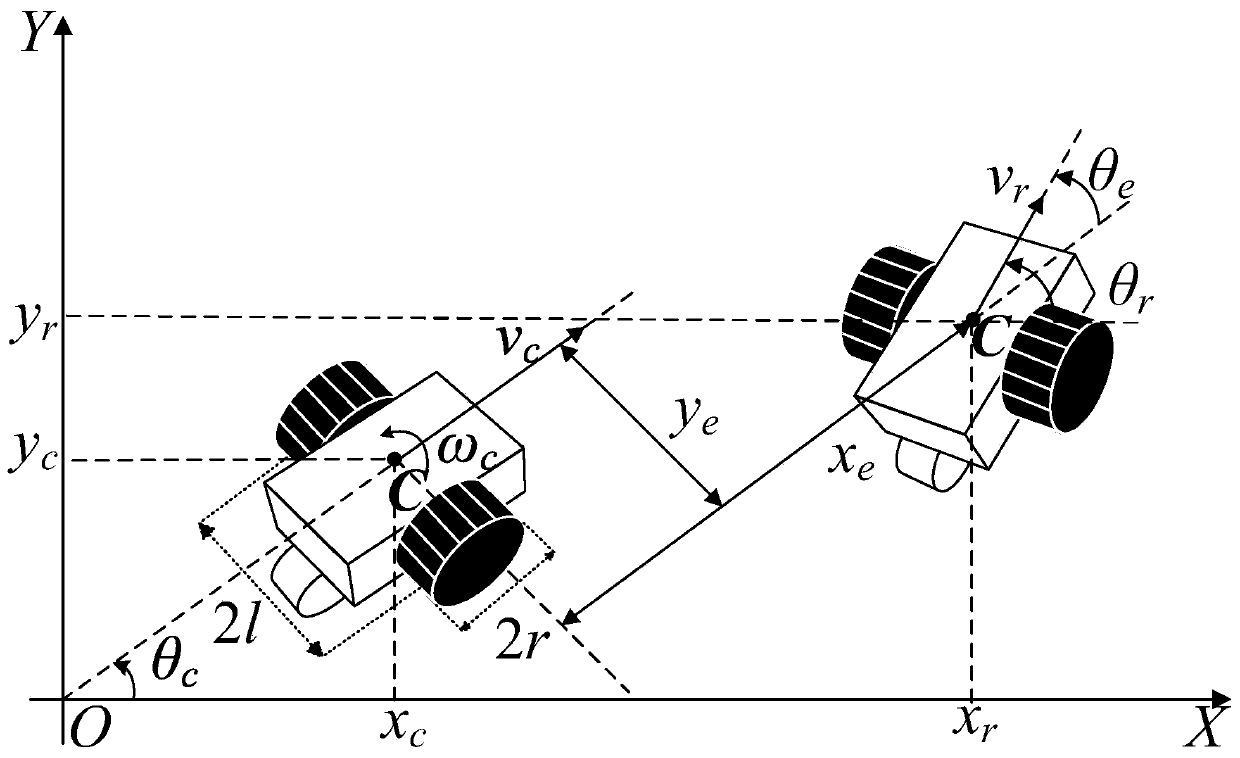
[0021] Specific implementation mode one: the general wheeled mobile robot is simplified to a two-wheeled model, such as figure 1 As shown in , assuming that the rotating wheel can only rotate forward and backward and steer differentially, the pose of the wheeled mobile robot in the two-dimensional environment is q c =[x c the y c θ c ] T , C is the geometric center point, and it is assumed to be collinear with the axes of the wheels on both sides, x c is the position coordinate of the center point in the X direction, y c is the position coordinate of the center point in the Y direction, θ c It is the angle between the moving direction of the wheeled mobile robot and the positive direction of the X axis. The radius of the wheel is r, and the distance between the centers of the wheels on both sides is 2l. Ideally, v c and w c Respectively, the linear velocity and angular velocity of the center of mass when moving forward, that is, the current motion command of the rob...
specific Embodiment approach 2
[0027] Specific implementation mode 2: This implementation mode further explains a new method of trajectory tracking of a mobile robot based on adaptive sliding mode control, and analyzes the kinematics model coupled with sliding and turning of the robot to obtain a compensation model. The relationship between the rotation of the wheels on both sides and the motion state of the center of mass of the vehicle is:
[0028]
[0029] where ω cl and ω cr are the rotational angular velocities of the left and right wheels. In particular, only the slip rate along the forward direction of each wheel is considered for rigidly constrained wheels.
[0030] Define the slip rate as:
[0031]
[0032] where let v sl and v sr is the effective driving speed of the left and right wheels to the center of mass, v l and v r is the actual sending speed of the wheel, s sl and s sr are the slip ratios of the left and right wheels, respectively.
[0033] Assuming that there is no transm...
specific Embodiment approach 3
[0045] Specific Embodiment Three: This embodiment is a further description of a new method for trajectory tracking of a mobile robot based on adaptive sliding mode control. When the vehicle is running on complex terrain, due to wheel subsidence, ground deformation and other reasons, there will be loss of motion state other than slipping, such as slipping.
[0046] Remember V e is the motion error term V e =[v e ω e ] T , is the deviation between the target motion state and the actual motion state. This method adopts the sliding mode variable structure control method to design the trajectory tracking controller of the wheeled mobile robot, and proposes an adaptive fast double power reaching law, and designs the trajectory tracking controller of the wheeled mobile robot accordingly.
[0047] The sliding mode switching function is designed as:
[0048]
[0049] Choose a fast double power reaching law:
[0050]
[0051] where k 1 ,k 2 ,k 3 >0,01 2 >1.
[0052] Acco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com