


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Robot operation trajectory acquisition method based on line laser sensor
A laser sensor and robot technology, applied in the field of robots, can solve the problems of inconsistent line direction, low efficiency, unstable processing quality, etc., and achieve the effect of improving automation level and improving operation efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0042] In order to make the technical solutions and advantages of the present invention clearer, the implementation method of the present invention will be further described below in conjunction with the accompanying drawings.
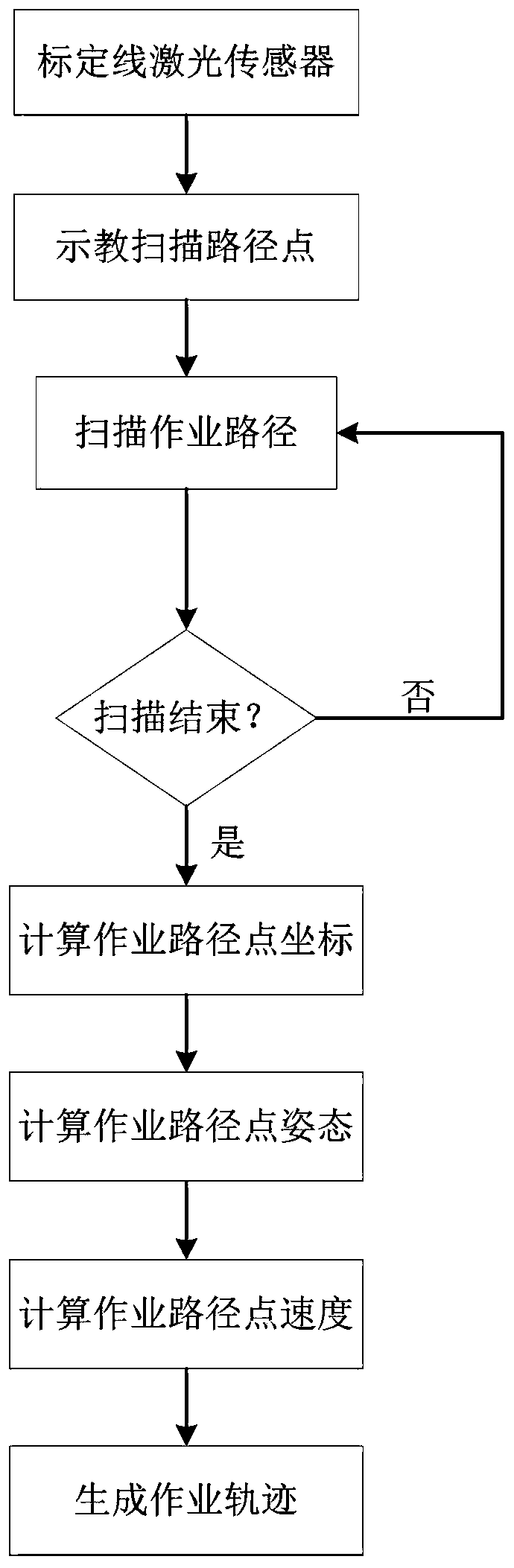
[0043] combine Figure 1-4 , a method for obtaining robot operation trajectory based on a line laser sensor, taking a certain high-grade leather bag sewing process as an example, comprising the following steps:
[0044] (1) Install the line laser sensor at the end of the robot through the end flange and calibrate the hand-eye relationship matrix between the outgoing line laser sensor and the coordinate system of the robot end flange;
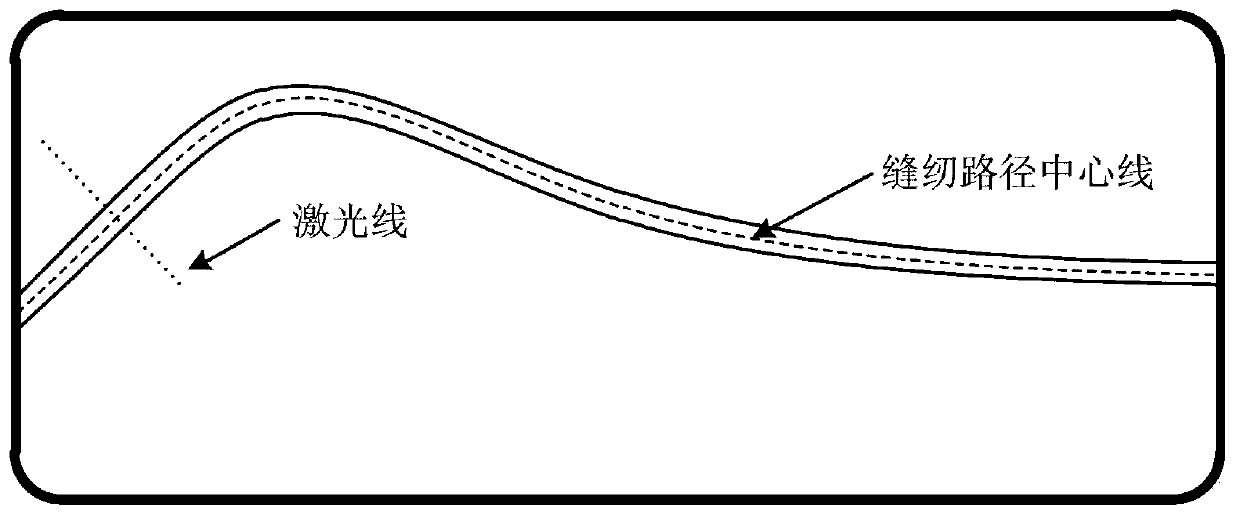
[0045] (2) The scanning trajectory of the manual teaching line laser sensor requires that on the scanning trajectory, each laser line intersects with the working path, and try to ensure that the laser line is perpendicular to the sewing path during the scanning process;
[0046] (3) After the online laser sensor moves a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com