Indoor robot navigation method based on environment characteristic detection
An indoor robot and environmental feature technology, applied in the field of robot navigation, can solve the problems of low intelligence and insufficient semantic information for positioning and navigation, and achieve the effect of convenient integration and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The technical solutions of the present invention will be described below in conjunction with the drawings and embodiments.
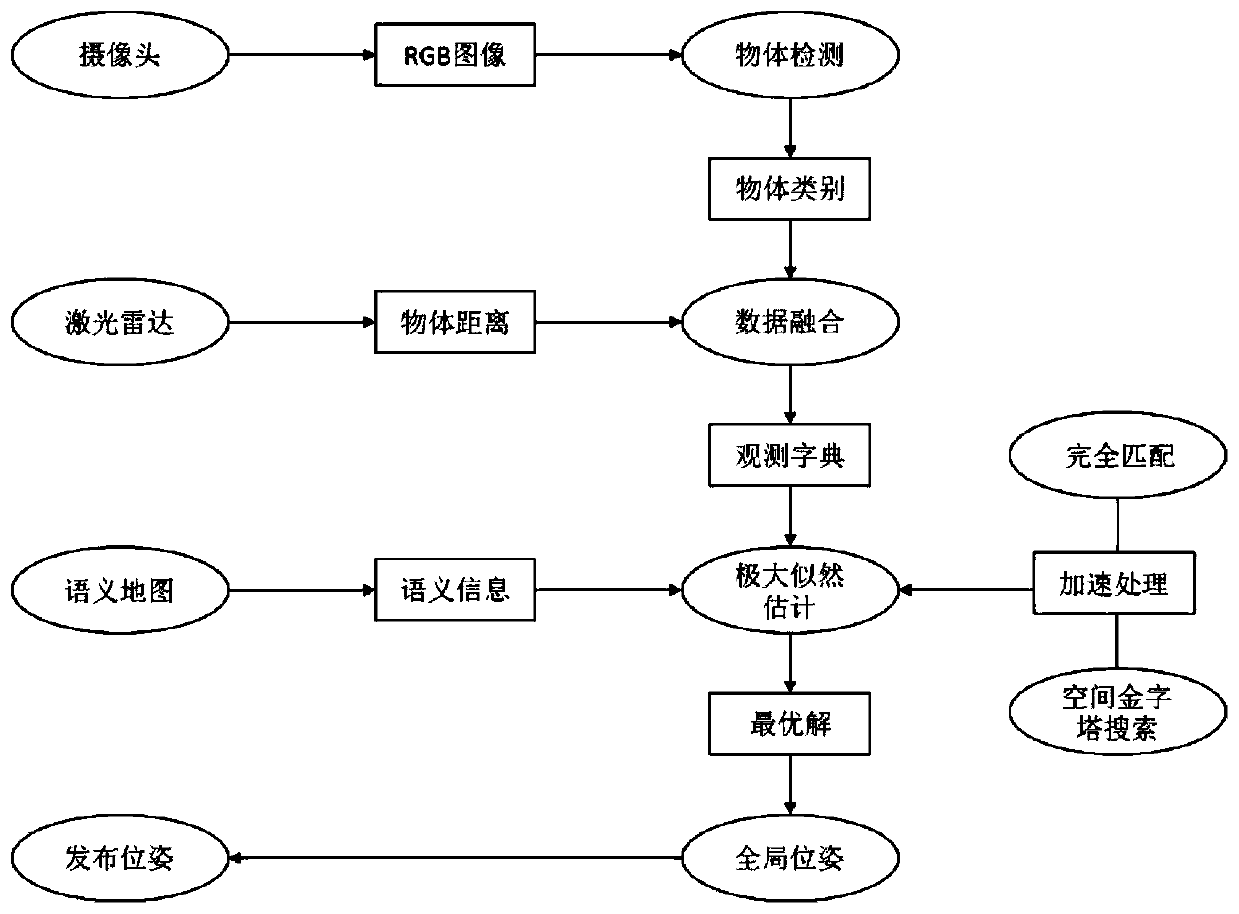
[0052] The indoor robot navigation method based on environmental feature detection provided by the present invention generally includes the following steps:
[0053] Step 1: firstly establish an indoor object data set, the present invention uses SSD (Single Shot MultiBoxDetector, single object multi-box detector) to carry out object detection model training and testing, and then integrates with Gmapping algorithm to establish the semantics of grid map and object position combination map;
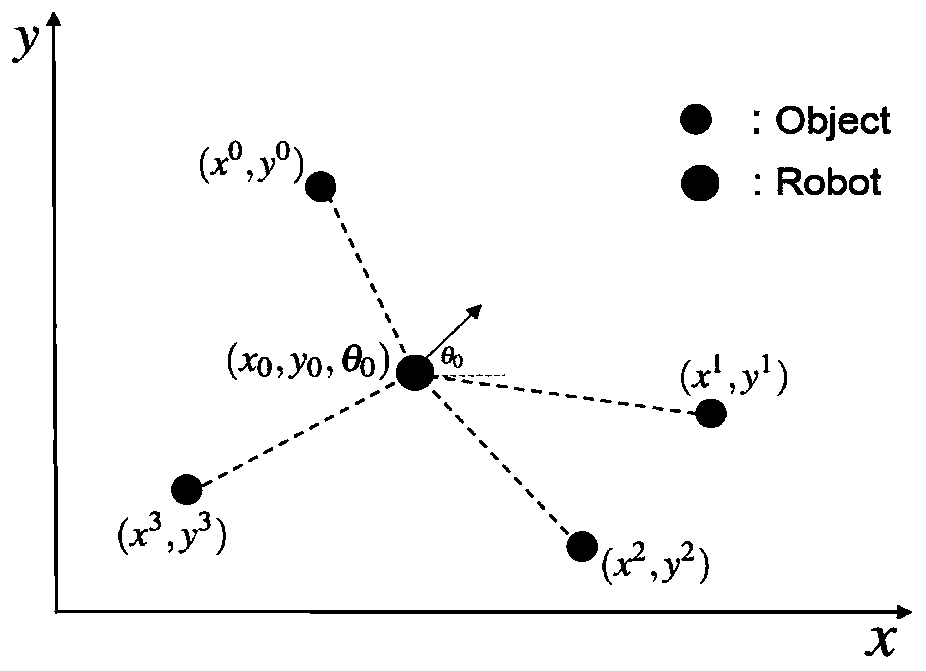
[0054] Step 2: Use the method of maximum likelihood estimation to perform global positioning of the robot. When the robot rotates in place, the object detection model is used to detect the object, and the semantic information in the semantic map is matched, and the maximum likelihood estimation method is used to estimate, and finally the global pose of the robo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com