Fuzzy PID motion control method of underwater robot based on ESO
An underwater robot, motion control technology, applied in the direction of electric controllers, controllers with specific characteristics, etc., to achieve the effects of rapidity, improved anti-interference ability, improved stability and anti-interference ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
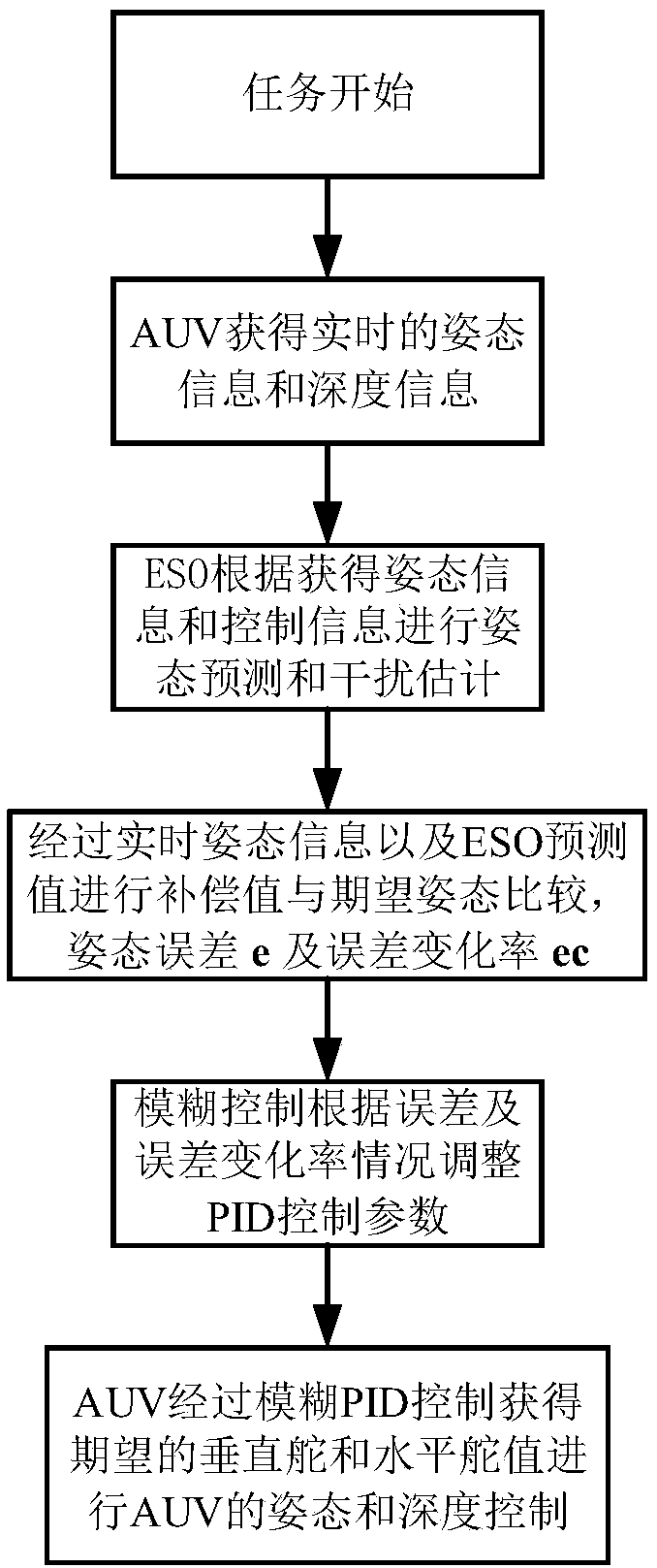
[0039] Example 1, such as figure 1 As shown, in order to realize the fuzzy PID motion control method of the underwater robot based on ESO, the following motion control system is proposed:
[0040] a classical PID controller; and,
[0041] The fuzzy control module integrated with the fuzzy logic control adjusts the PID control parameters through the real-time attitude information of the AUV, improves the adaptability of the control parameters in different environments, and improves the control stability of the AUV;
[0042] Extended state observer ESO, ESO performs attitude observation and interference estimation through the heading or pitch information fed back by AUV and AUV control information, and performs attitude feedback compensation and control compensation on AUV. That is, the attitude error predicted by ESO and the compensation amount of the error change rate are fed back to the system input and the interference prediction compensation amount is fed back to the contr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com