Target object ranging method based on deep learning under truck environment
A technology of deep learning and target objects, applied in the interpretation of photos, biological neural network models, neural architectures, etc., can solve problems such as inability to remind
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
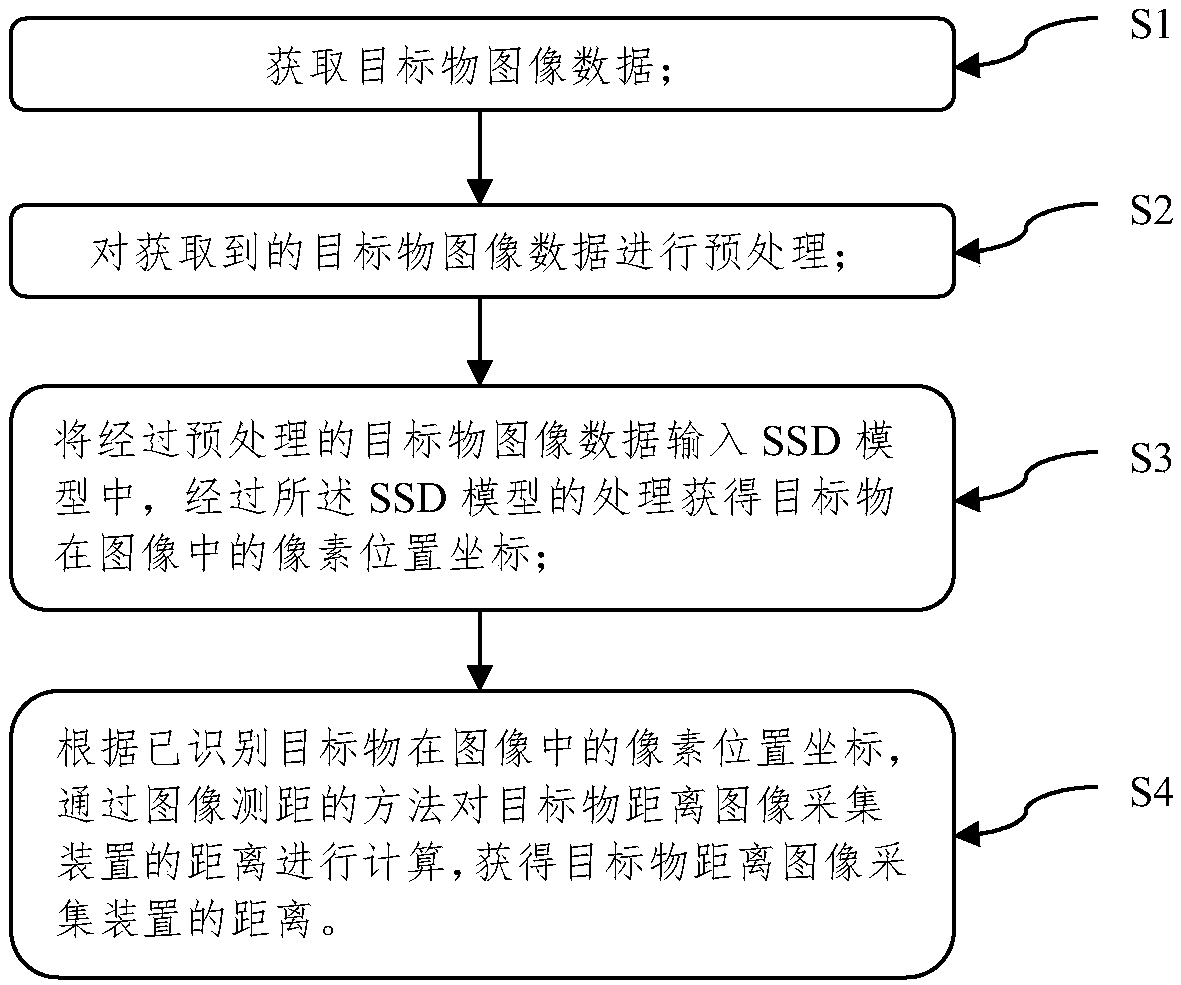
[0080] Such as figure 1 Shown: the present embodiment discloses a method for measuring distance of objects in a truck environment based on deep learning, including the following steps:
[0081] S1. Acquiring target image data.
[0082] It should be noted that the target object image data described in this step is the target object image acquisition data acquired by the image acquisition device located on the mining truck, wherein the target object can be other targets such as mining trucks, people, etc. The image data of the target object here is the image data of other mining trucks; of course, there can be multiple image acquisition devices on the mining truck in this embodiment.
[0083] S2. Preprocessing the acquired image data of the target object.
[0084] The preprocessing in this step mainly includes: randomly intercepting a part of the target image and distorting it, randomly flipping the image left and right, randomly distorting the color (such as brightness, satur...
Embodiment 2
[0146] This embodiment discloses a method for measuring the distance of an object in a truck environment based on deep learning, which specifically includes the following steps:
[0147] (1) For a truck transporting ore in an open-pit mine, each image acquisition device on the truck collects image information of a corresponding area.
[0148] (2) The image processing center connected to all image acquisition devices on the truck processes the image information in real time to determine the pixel position of the target to be identified in the acquired image.
[0149] (3) According to the pixel position of the recognized target in the image, the distance between the target and the image acquisition device is calculated by the method of image ranging.
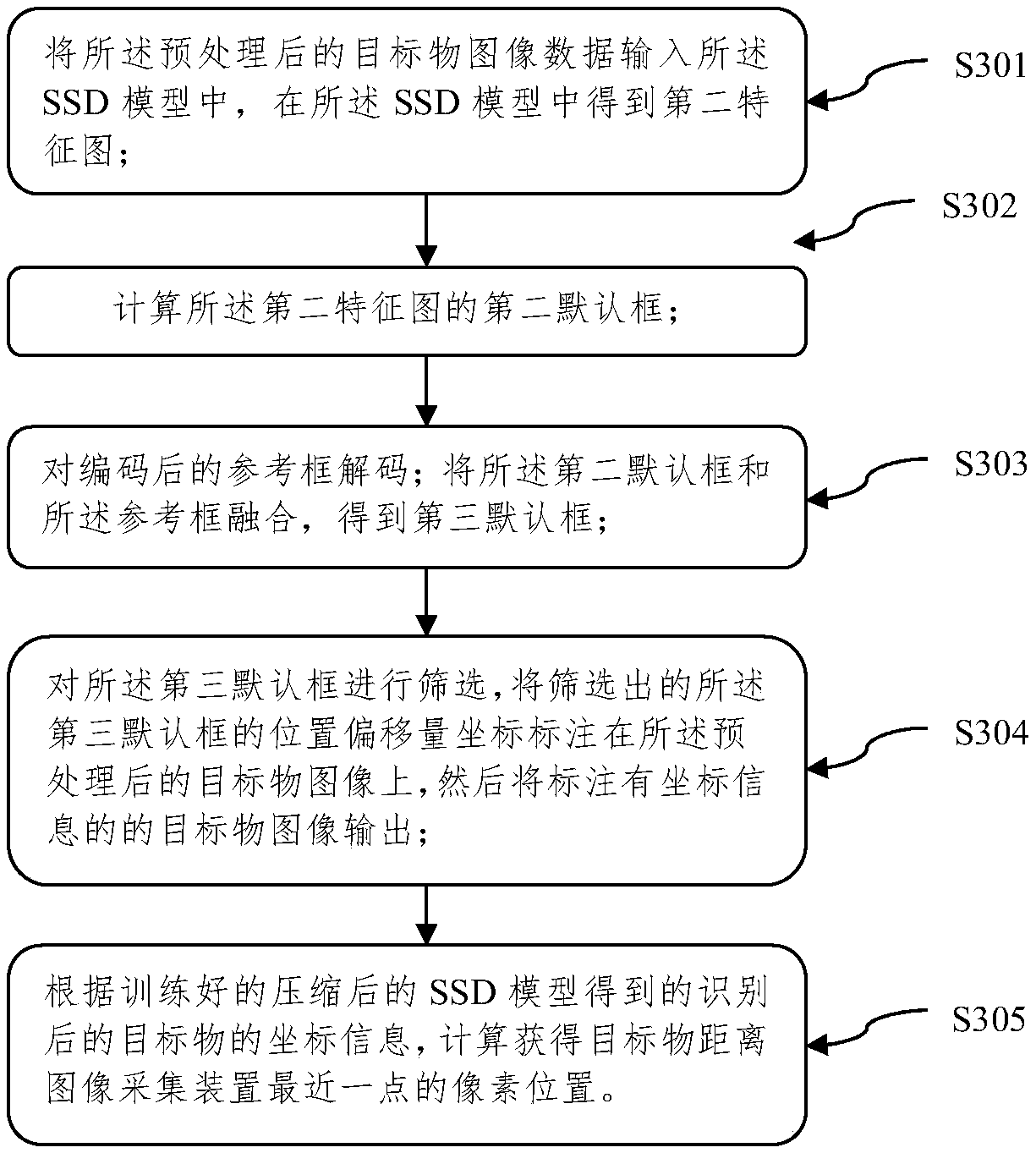
[0150] Wherein, step (2) specifically includes:
[0151] (2.1) Perform preprocessing on the images collected by each image acquisition device, and obtain preprocessed images.
[0152] (2.2) The compressed SSD model is trained us...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com