Method and device for avoiding obstacles by unmanned aerial vehicle, equipment and storage medium
A technology for drones and obstacles, applied in the field of drones to avoid obstacles, can solve problems such as track jitter, and achieve the effect of autonomous obstacle avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
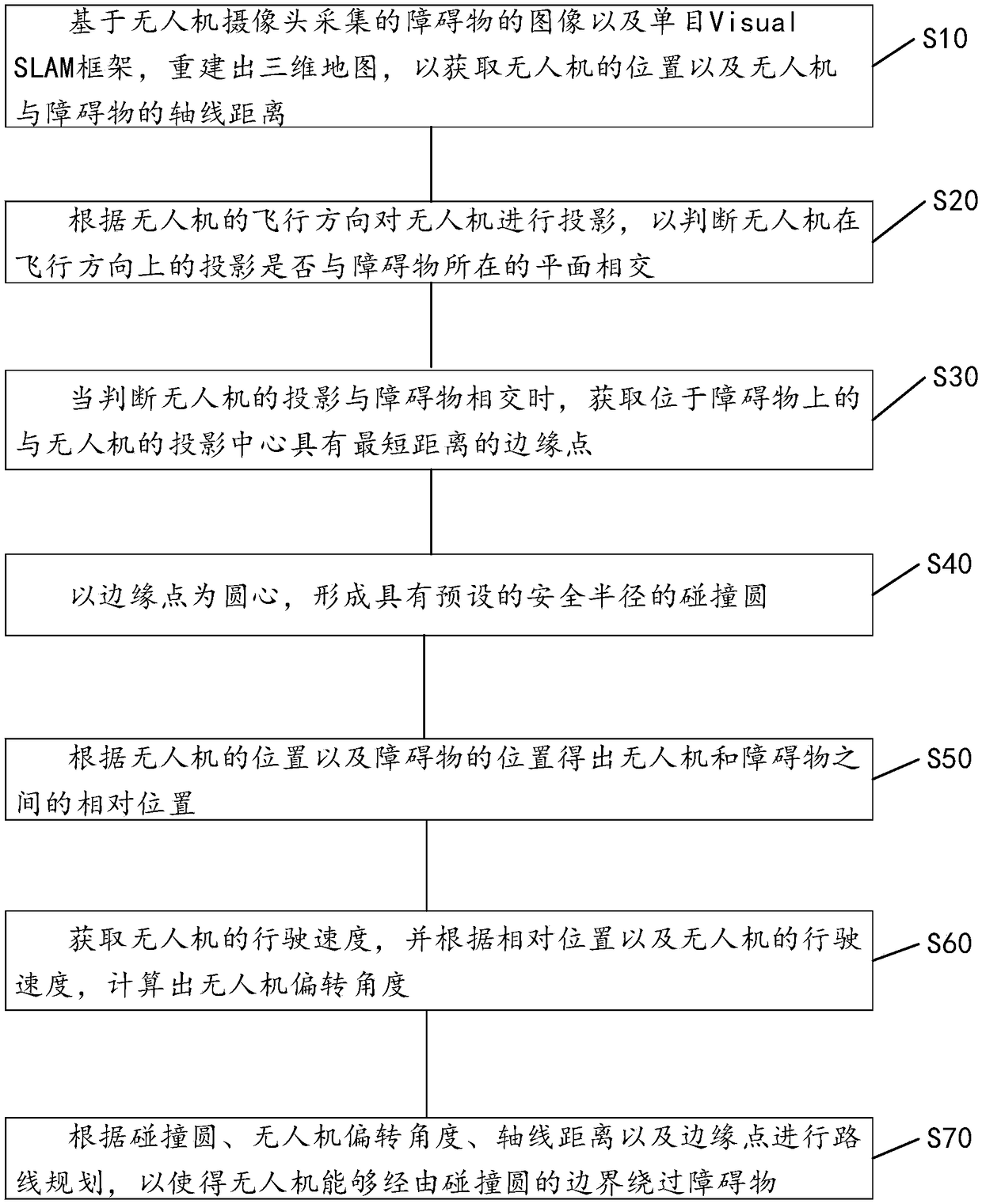
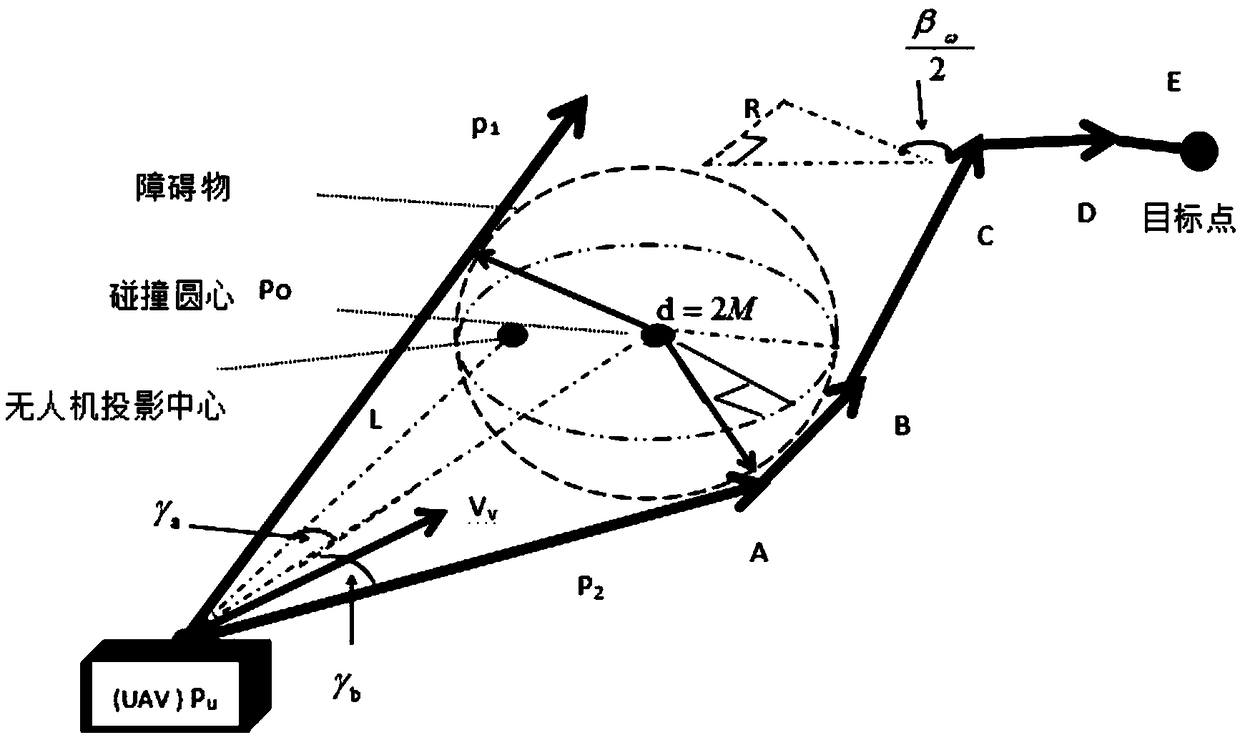
[0048] see figure 1 with figure 2 , The embodiment of the present invention provides a method for a drone to avoid obstacles, the method comprising:
[0049] S10, reconstructing a three-dimensional map based on the image of the obstacle collected by the camera of the drone and the monocular Visual SLAM framework, so as to obtain the position of the drone and the axis distance between the drone and the obstacle.
[0050] In this embodiment, a monocular camera and a satellite positioning receiver are pre-installed on the drone. The images around the unmanned aerial vehicle photographed by the monocular camera include obstacle images, the satellite positioning receiver is anchored in the whole world, and the position in world coordinates is used to provide bit information for the ground coordination computer to realize wireless Human-machine path planning.
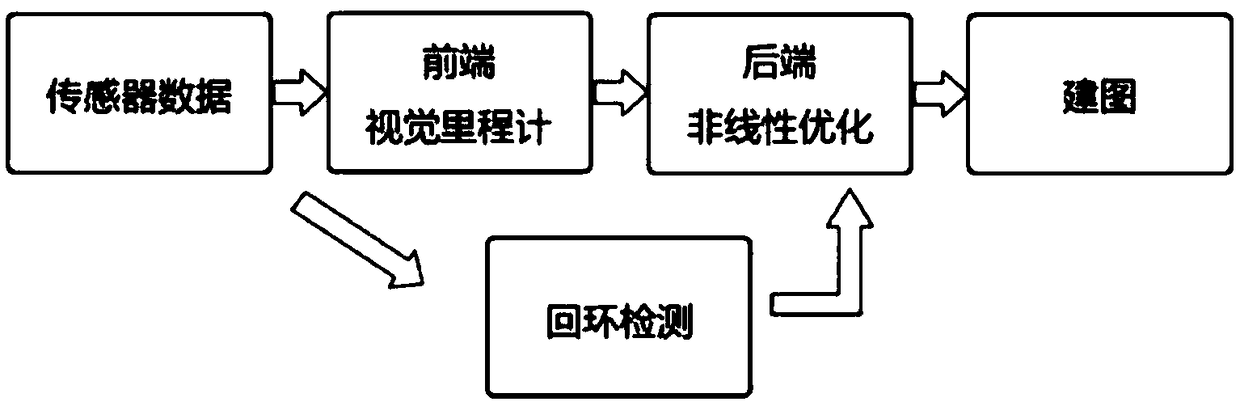
[0051] see image 3 , in this embodiment, the monocular Visual SLAM framework is sensor data, front-end, back-end, loop ...
no. 2 example
[0077] The second embodiment of the present invention provides a device for a drone to avoid obstacles, including:
[0078] The reconstruction module 100 is used to reconstruct a three-dimensional map based on the image of the obstacle collected by the camera of the drone and the monocular Visual SLAM framework, so as to obtain the position of the drone and the axial distance between the drone and the obstacle .
[0079] The judgment module 200 is configured to project the UAV according to the flight direction of the UAV, so as to judge whether the projection of the UAV in the flight direction intersects the plane where the obstacle is located.
[0080] The acquisition module 300 is configured to acquire an edge point on the obstacle that has the shortest distance from the center of the projection of the drone when it is judged that the projection of the drone intersects the obstacle.
[0081] The forming module 400 is configured to form a collision circle with a preset safet...
no. 4 example
[0096] A fourth embodiment of the present invention provides a computer-readable storage medium, and the computer-readable storage medium includes a stored computer program, such as a program of a method for avoiding obstacles by a drone. Wherein, when the computer program is running, the device where the computer-readable storage medium is located is controlled to execute the obstacle avoidance method for the drone described in any of the above embodiments.
[0097] Exemplarily, the computer program described in the third embodiment and the fourth embodiment of the present invention can be divided into one or more modules, the one or more modules are stored in the memory, and the The processor executes to complete the present invention. The one or more modules may be a series of computer program instruction segments capable of completing specific functions, and the instruction segments are used to describe the execution of the computer program in the implementation of the UAV...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com