Control method of adjustable vortex ejection rod-climbing robot
A technology of vortex jetting and control method, which is applied in the field of climbing rod robots, can solve the problems of water flow without sufficient strength, weight imbalance, no change in water flow path, etc., and achieves the effect of saving energy loss and avoiding weight imbalance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
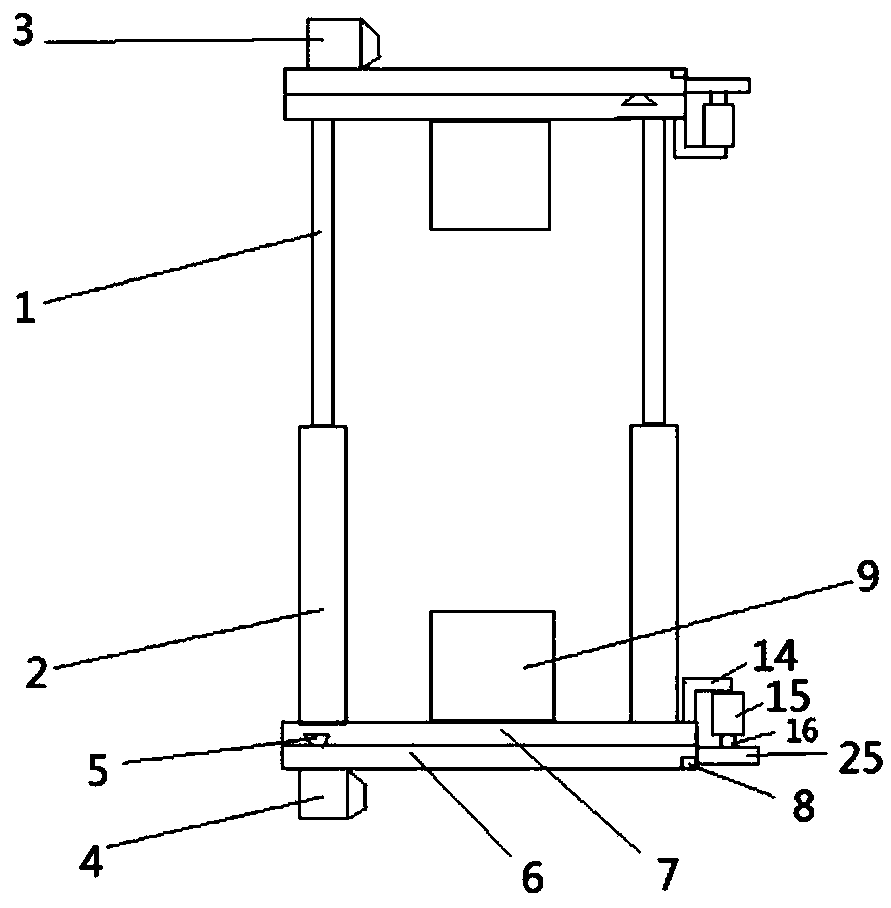
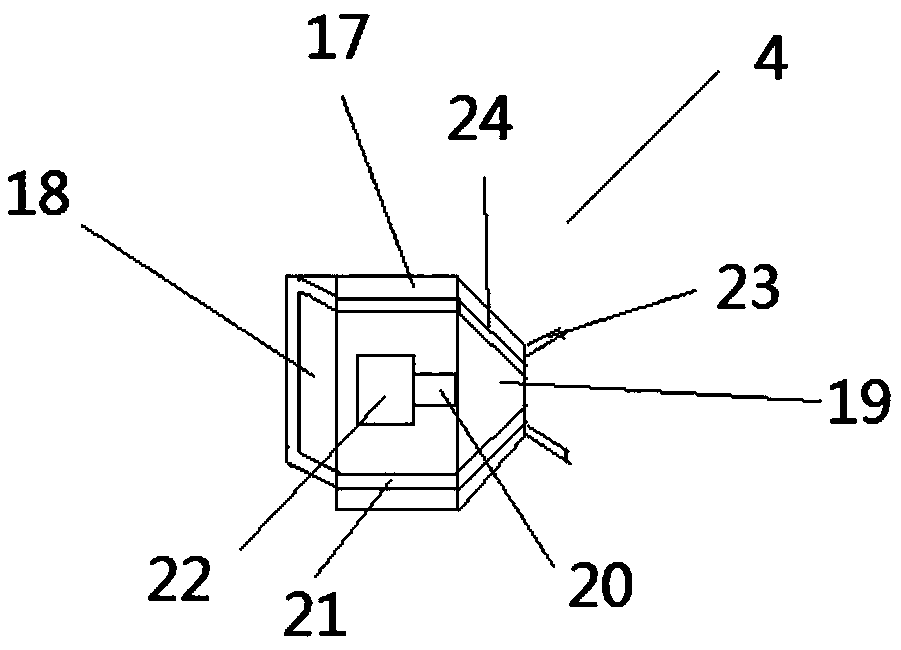
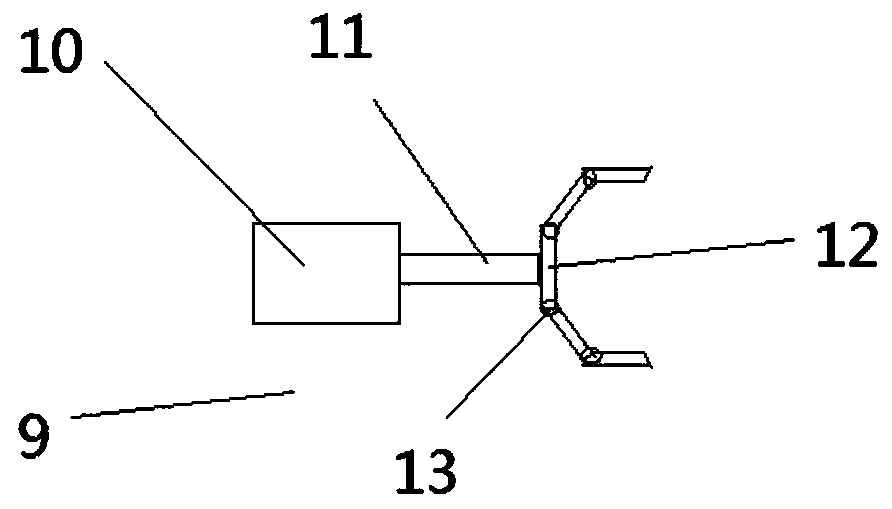
[0038] As shown in the figure: a control method of an adjustable vortex spraying rod climbing robot, including a piston rod, a cylinder, an upper cleaning structure, a lower cleaning structure, a trapezoidal slider, a water storage structure, a bracket seat, a water injection port, and a clamping structure , clamping cylinder, clamping lever, multi-section gripper, pivot joint, bracket, motor, motor output shaft, cleaning block, connection block, nozzle, nozzle motor shaft, annular flow channel, nozzle motor, nozzle flap , a spiral flow channel, a pinion, and a clamping structure; the control method includes a preparation step, a pole climbing control step, and a cleaning control step.
[0039] As shown in the figure: the cylinder and the piston rod are connected between the two brackets, and the up and down movement is realized through the expansion an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com