AGV inertial navigation correction method based on simulated annealing
An inertial navigation and simulated annealing technology, applied in the field of AGV navigation, can solve the problems of increasing positioning error, inaccurate AGV positioning, affecting the working efficiency of AGV, etc., to achieve the effect of efficient navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0028] A preferred embodiment of the present invention will be described below with reference to the accompanying drawings.
[0029] see figure 1 and figure 2 , the AGV inertial navigation correction method based on simulated annealing, is characterized in that: comprises the following steps:
[0030] Step A. Install encoders on the left and right front wheels of the AGV to measure the rotation angle of the corresponding wheels during the AGV’s travel, and calculate the distance traveled by the corresponding wheels according to the radius of the wheels, and install RFID readers and magnets on the AGV body. sensor;
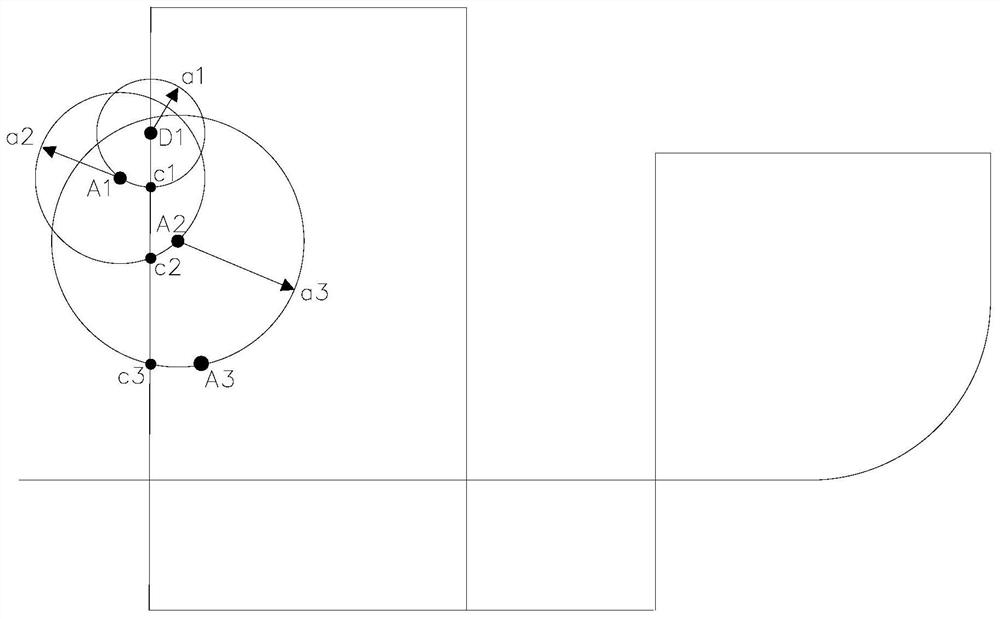
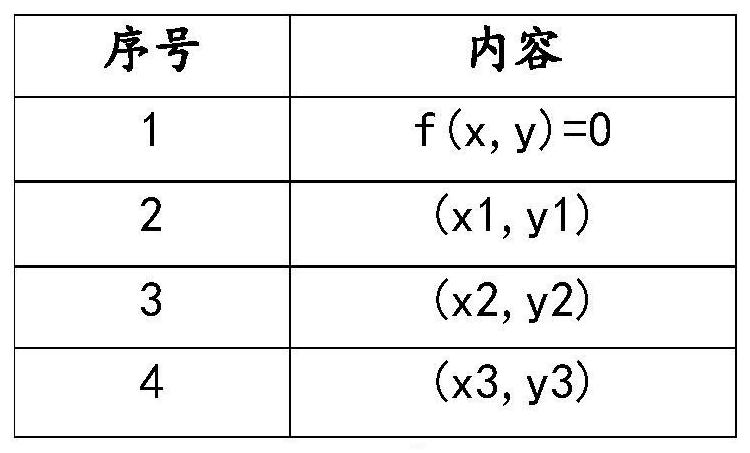
[0031] Step B. In the working area of the AGV, establish a rectangular coordinate system according to the specific situation, and use the rectangular coordinate system as the global coordinate system for AGV navigation;
[0032]Step C. On the global coordinate system, plan the AGV driving path, and divide the planned AGV driving path into N segments that can ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com