Neural network-based method for swarm robots to realize cooperative foraging through using pheromone-based communication
A neural network, swarm robot technology, applied in the direction of instruments, general control systems, comprehensive factory control, etc., can solve the problem that multi-robot behavior learning is not well solved, to promote local communication, accelerate the emergence process, and automatically optimize. Effects of paths and actions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0112] Example: Simulation experiment of swarm robot collaborative foraging
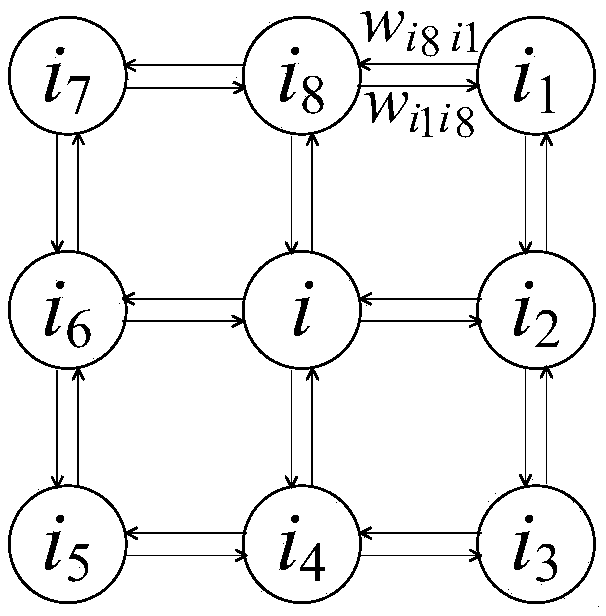
[0113] In order to illustrate the realization method of pheromone communication among swarm robots based on neural network, a simulation experiment was carried out on the mobile robot environment modeling and exploration software platform established in the laboratory. The nest of the foraging robot is located in the lower left corner of the working space. The robot starts to search for food sources from the nest. The food source is located in the upper right corner of the working environment. As shown in Figure 4(a), the gray rectangle is movable obstacle. The repulsive pheromone P released by the search robot (circle) according to equation (1) "discrete-time dynamic equation of the i-th neuron" o and P e Gradually attenuates and propagates to the entire workspace, as shown in Figure 4(b), the repelling pheromone P o and P e The area of is the area that the robot has already searched, and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com