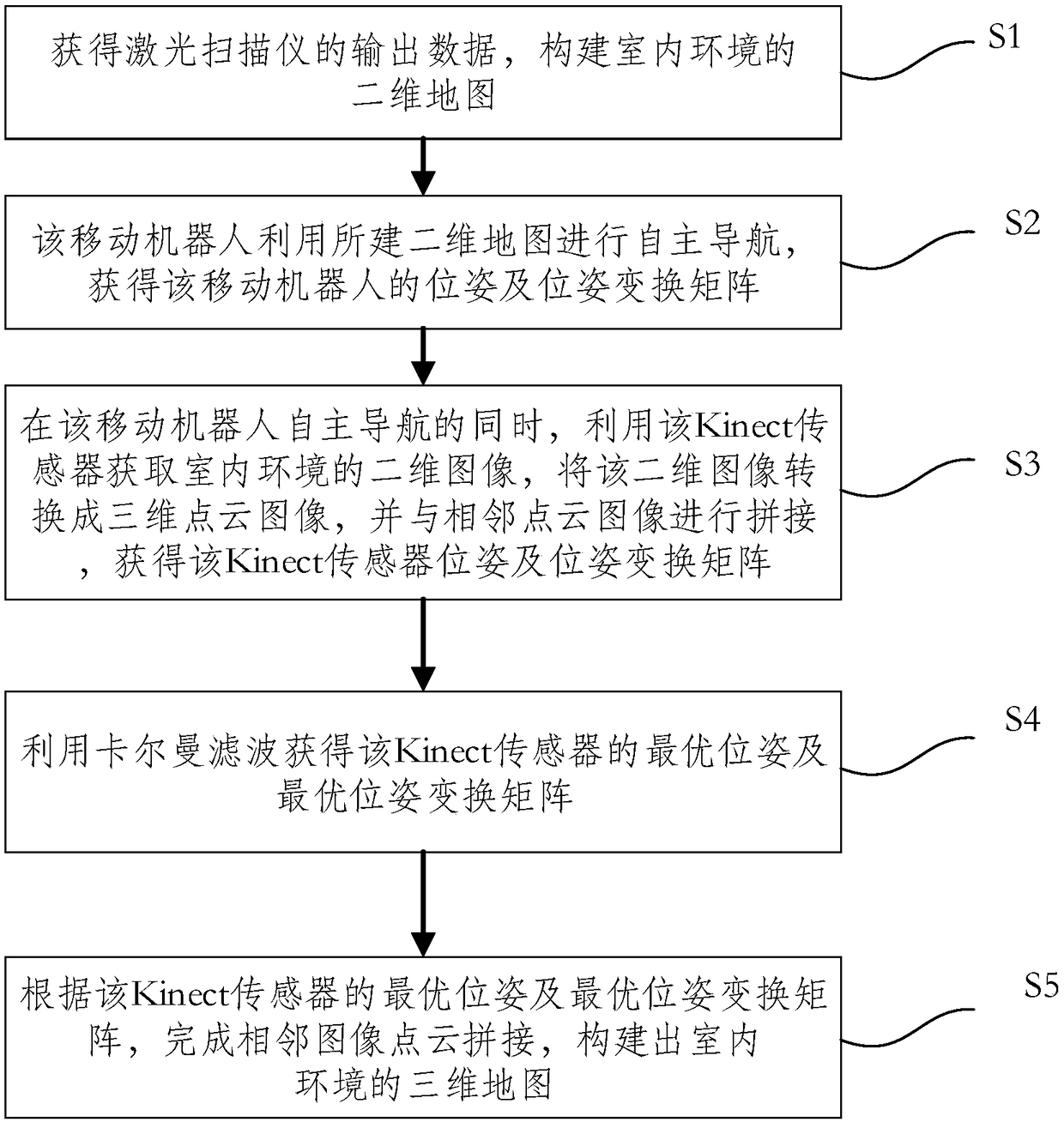
A method of building a three-dimensional map
A technology of three-dimensional maps and two-dimensional images, which is applied in image enhancement, image analysis, 3D modeling, etc., can solve the problems of large errors and low positioning accuracy, and achieve the effects of low cost, avoiding wrong matching, and overcoming image matching confusion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0029] The experimental environment of the embodiment of the present invention is the corridor of a certain experimental building, the indoor environment of offices and laboratories. In this embodiment, the mobile robot explores the public areas of the floors.
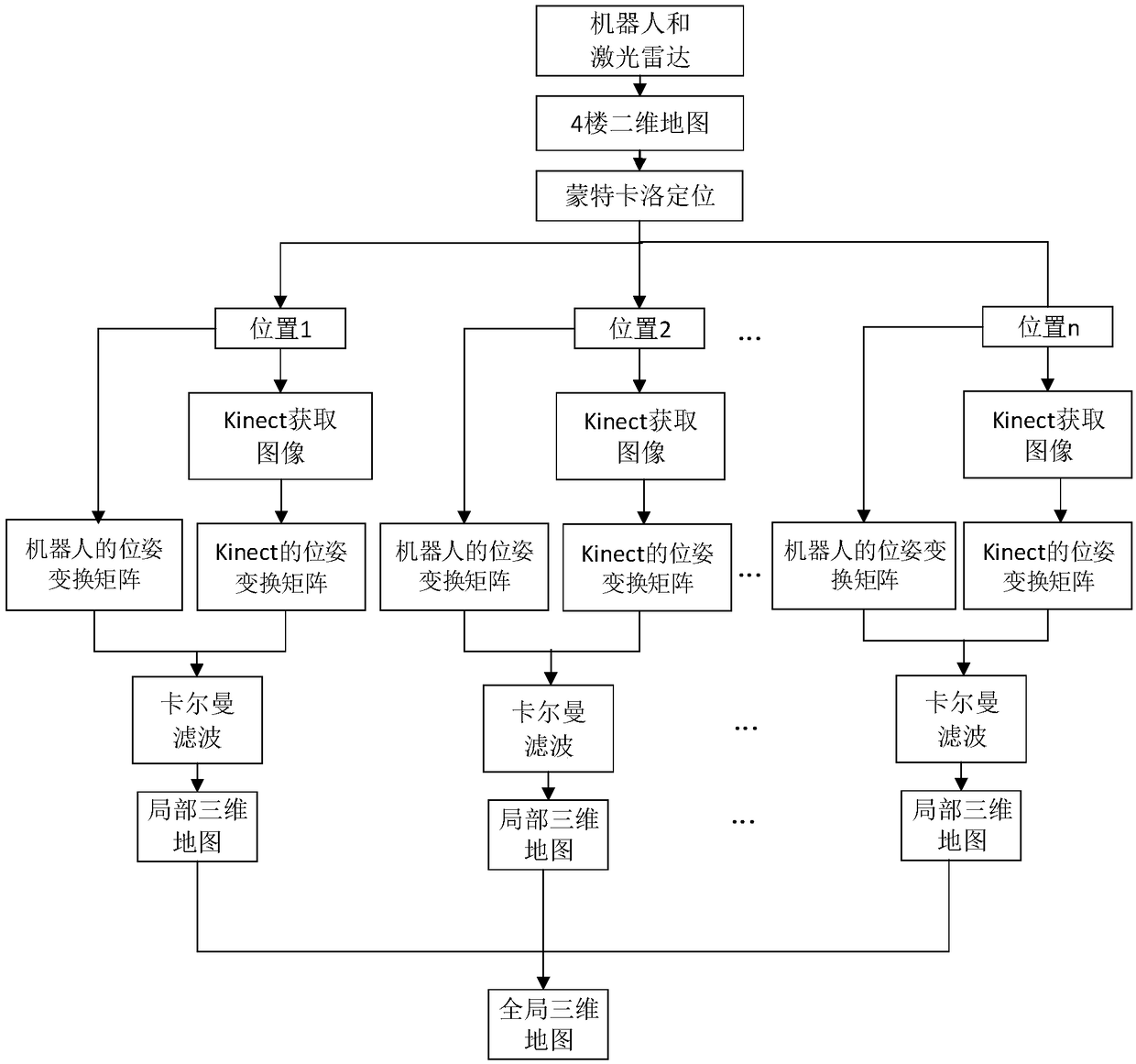
[0030] Use TurtleBot mobile robot in the present embodiment, on this mobile robot, wheel encoder, laser scanner and Kinect sensor are installed, in the present embodiment, this laser scanner is Rplidar laser radar, and the scanning range of this Rplidar laser radar is 360°, the maximum measuring distance is 6 meters. The implementation system adopted is the Ubuntu system, and the ROS system platform and Arduino development board are built, and the Opencv open source software is used to realize it with C++...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com