Archimedes spiral line-based power inspection path calculation method of unmanned aerial vehicle
An Archimedes spiral and path calculation technology, applied in non-electric variable control, vehicle position/route/height control, instruments, etc., can solve problems such as control strategy and algorithm complexity, to ensure flight control parameters and obtain lift Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
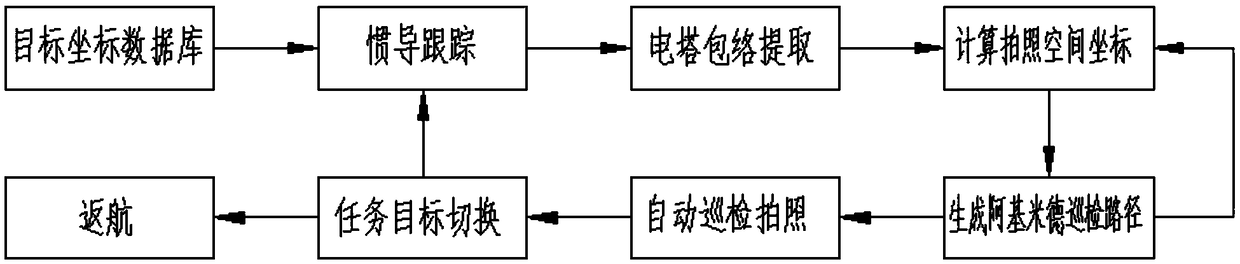
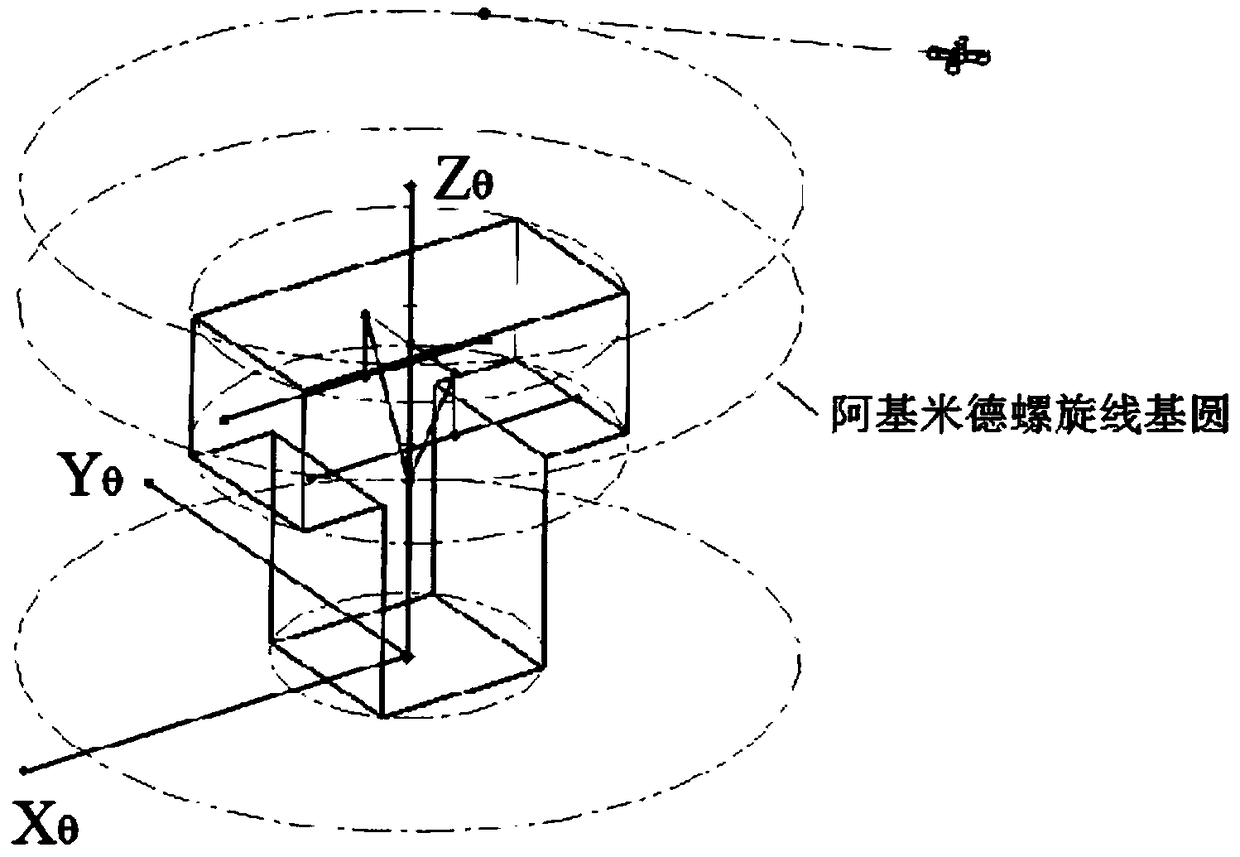
[0037] Such as figure 1 As shown, the target coordinate database is used as the basic data of the inspection operation, that is, the minimum turning radius of the drone, the coordinate point of the power tower, the safe flight distance of the drone, the tower height and the type of the power tower when setting the mission path Parameters such as the number of camera points, etc. are input into the UAV main control core with Nvidia TK1 as the core, which comprehensively includes the image processing board and the main control board. Using the DJI M600 multi-rotor UAV as the flying platform, inspect the 200kv double-circuit suspension tower, input the coordinate parameters of the power tower, set the safe flight distance of the UAV to 15m, the height of the tower to 40m, and the type of suspension tower. The number of photographing points is 8, and the number of photographing points is set as the equal point of the total length of the Archimedes spiral path. Since the eighth pho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com