High-precision camera calibration and target attitude estimation method
A technology for camera calibration and target attitude, which is applied in computing, image data processing, instruments, etc., can solve the problems that corners are easily disturbed by noise and light conditions, estimation errors, etc., and achieve the effect of fast calculation speed and high target accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] Exemplary embodiments of the present disclosure will be described in more detail below with reference to the principle on which the present invention is based and the accompanying drawings.
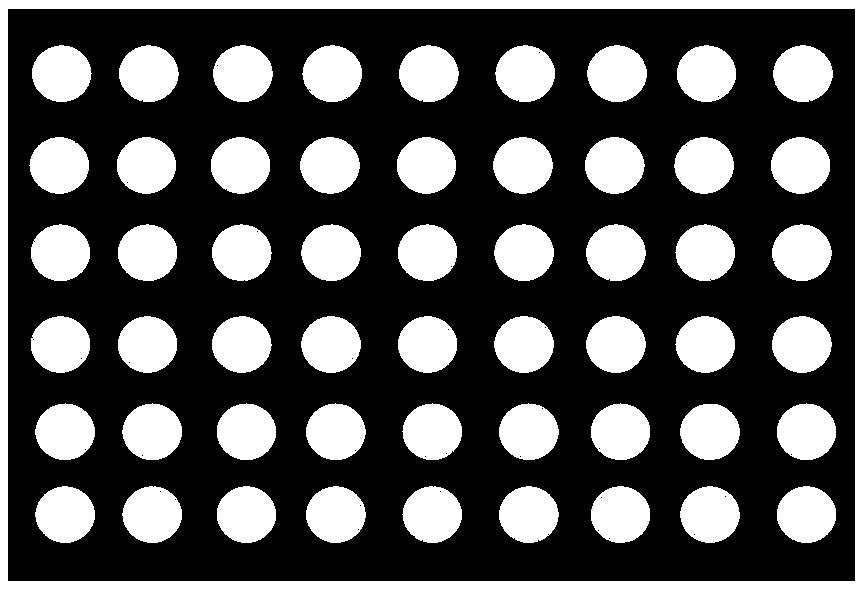
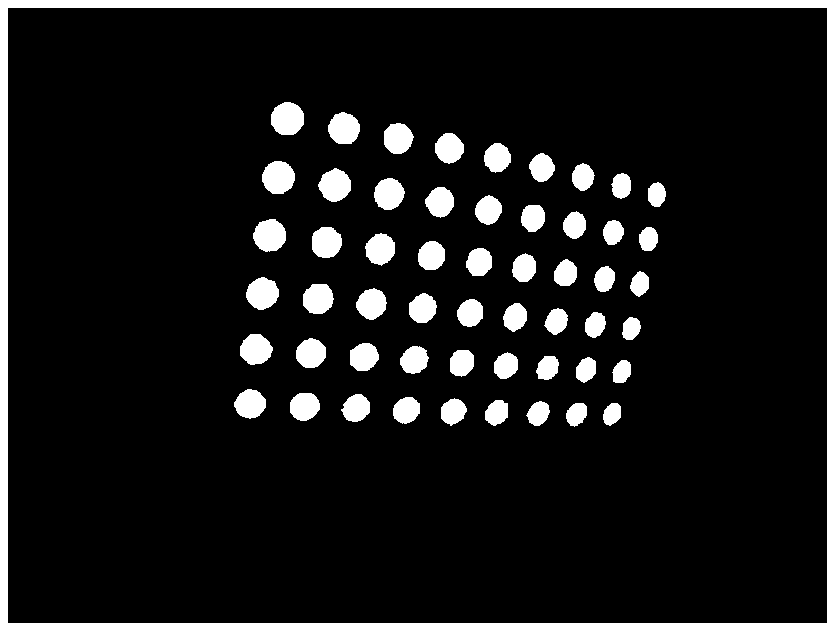
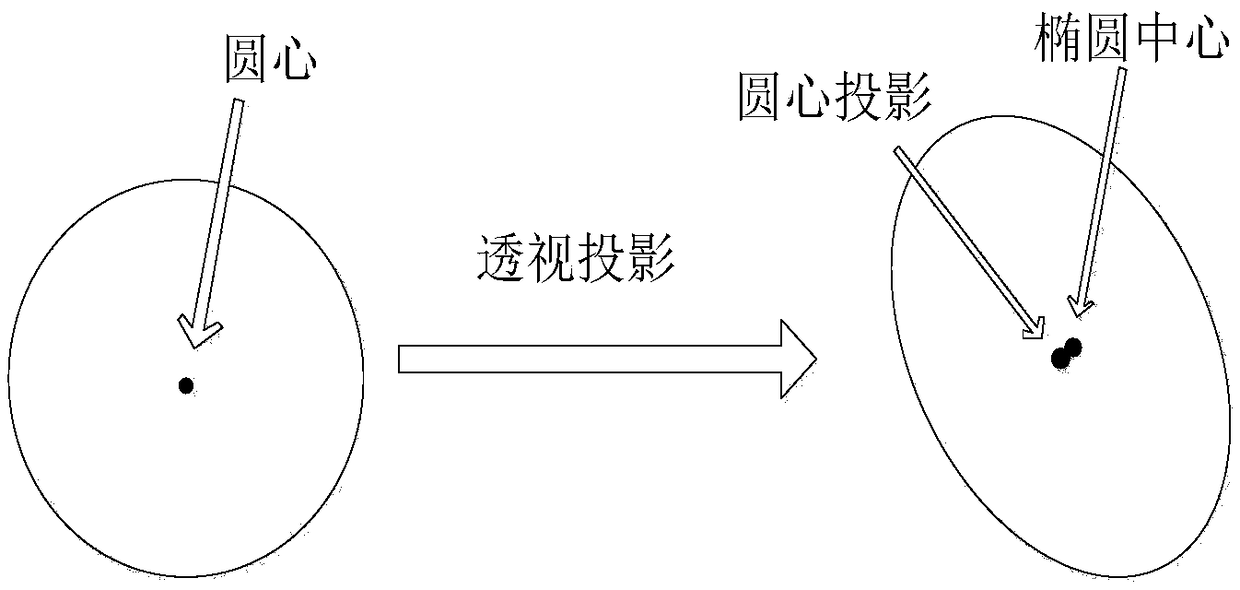
[0041] First introduce the camera model example, given the feature point set of the plane target: (X i ,Y i ,0), i=1,2,...,N, its pixel coordinates in the camera projection space are: (u i ,v i ), i=1,2,...,N. According to the camera model, the two have the following relationship:
[0042]
[0043] Among them: A is the internal reference matrix of the camera, R and t are the projection attitude parameters of the target, that is, rotation and translation.
[0044] Due to the distortion of the camera lens, the actual imaging point is: its sum (u i ,v i ), i=1,2,...,N relation is:
[0045]
[0046] Among them: (k 1 ,k 2 ,k 3 ),(p 1 ,p 2 ) are the camera radial and tangential distortion coefficients, respectively.
[0047]The calibration process is as long as the ac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com