


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Robot path interference detection method and system
A technology of interference detection and robots, applied in the field of robot movement, can solve problems such as robot deadlock, immature robot technology, and blocking, and achieve the effect of avoiding encounters and making judgment methods efficient and simple
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
no. 1 example
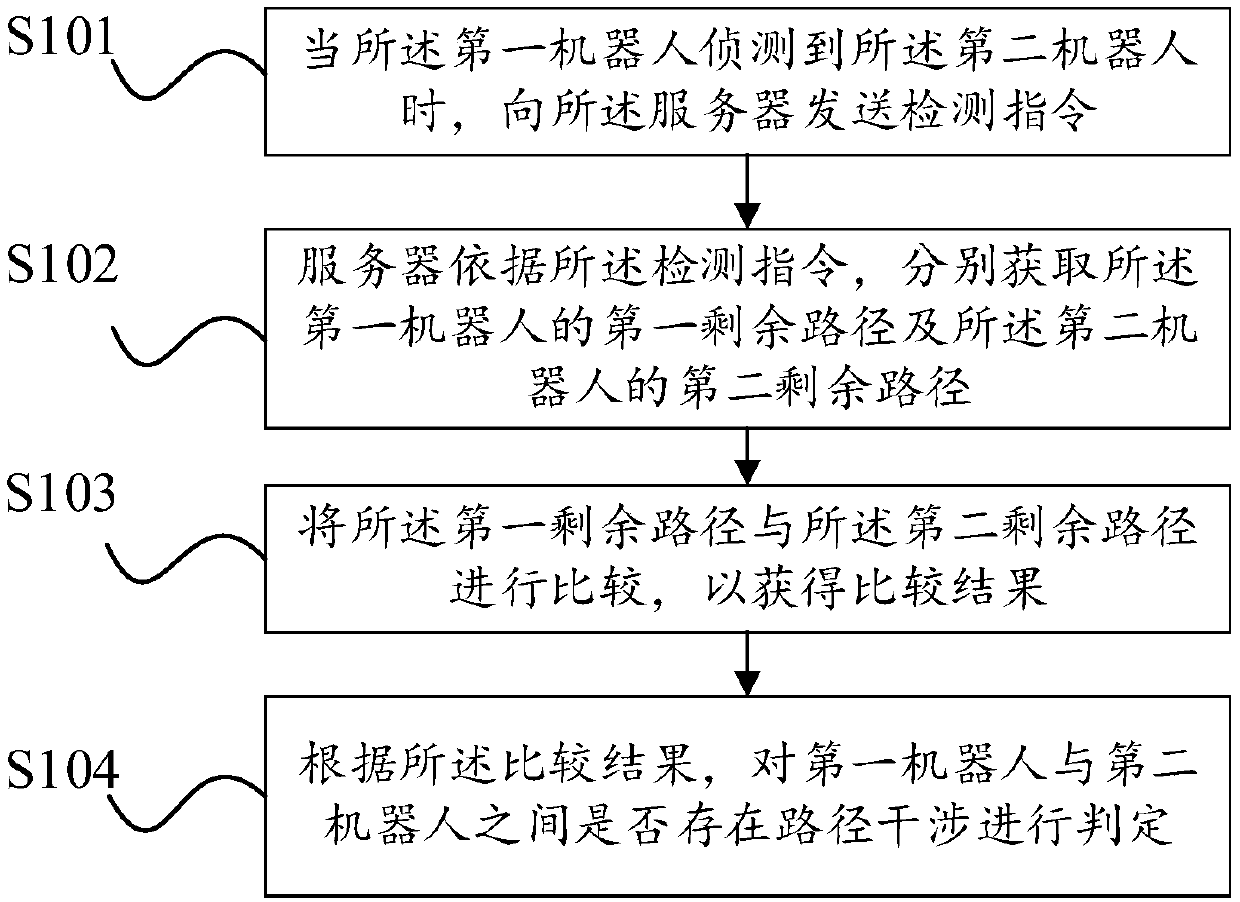
[0024] Please refer to image 3 , image 3 It is a flow chart of a robot path interference detection method provided by a preferred embodiment of the present invention. The above robot path interference detection method is applied to figure 1 Robot path interference detection system in . The above robot path interference detection method includes the following steps:
[0025] Step S101 , when the first robot detects the second robot, send a detection instruction to the server 100 .
[0026] In the embodiment of the present invention, the first robot may be provided with a perception unit (such as an infrared probe, an image recognition unit) for real-time perception of obstacles in the surrounding environment during operation. Corresponding to the first robot, other robots 200 also belong to obstacles. When the first robot perceives that there is an obstacle nearby, it is judged whether it is the second robot by extracting the size or identification feature of the recogni...
Embodiment approach
[0043] As an implementation manner, the following algorithm may be used to implement step S103, specifically:
[0044]
[0045] Among them, l jk Represents that the sequence number on the first displacement path is i j The sequence number on the grid path point and the second displacement path is i k The distance length value of the raster path point, m js is the serial number corresponding to the first target grid path point corresponding to the first position information on the first displacement path, m ks is the sequence number corresponding to the second target grid path point corresponding to the second position information on the second displacement path. i j The value of can be not less than m js and not greater than m js +min(m j -m js ,m k -m ks ), and m j is the total number of grid path points corresponding to the first displacement path; i k The value of can be not less than m ks and not greater than m ks +min(m j -m js ,m k -m ks ), and m k ...
no. 2 example
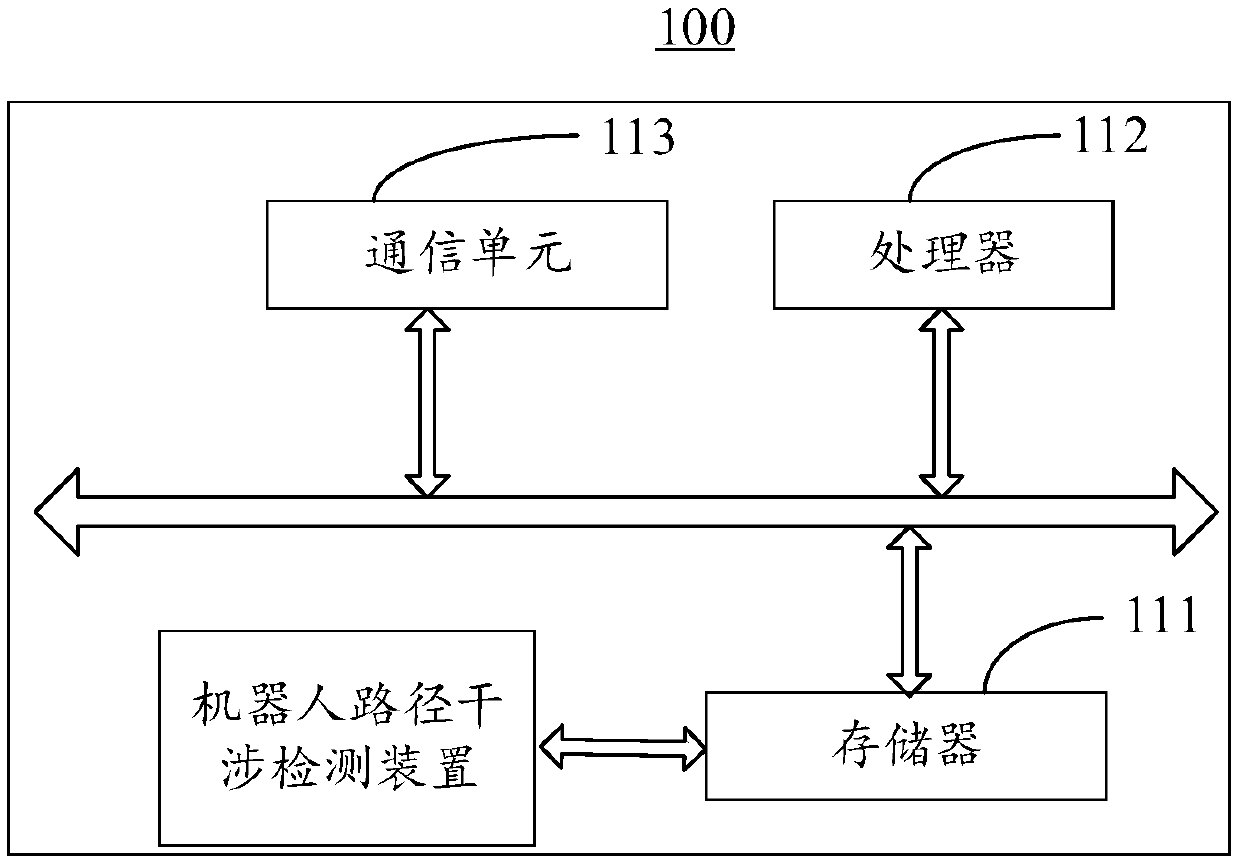
[0051] A robot path interference detection system provided by a preferred embodiment of the present invention includes a server 100, a first robot and a second robot, and the server 100 is connected to the first robot and the second robot by communication respectively.
[0052] The first robot is configured to send a detection instruction to the server 100 when detecting the second robot.
[0053] The server 100 is configured to respectively acquire a first remaining path of the first robot and a second remaining path of the second robot according to the detection instruction.
[0054] Preferably, a first displacement path composed of multiple grid path points is pre-generated in the first robot; a second displacement path composed of multiple grid path points is pre-generated in the second robot. Obtain the first displacement path and the second displacement path respectively, receive the current first position information of the first robot and the current second position in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com