Scene test method for intelligent vehicle based on ADAS function
A test method and technology for smart cars, which are applied in vehicle testing, machine/structural component testing, and measuring devices, etc., can solve the problems of inability to quantify the execution of test methods, single scenarios, and low degree of reduction, and achieve reliable test results. The effect of increasing flexibility and reducing test time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
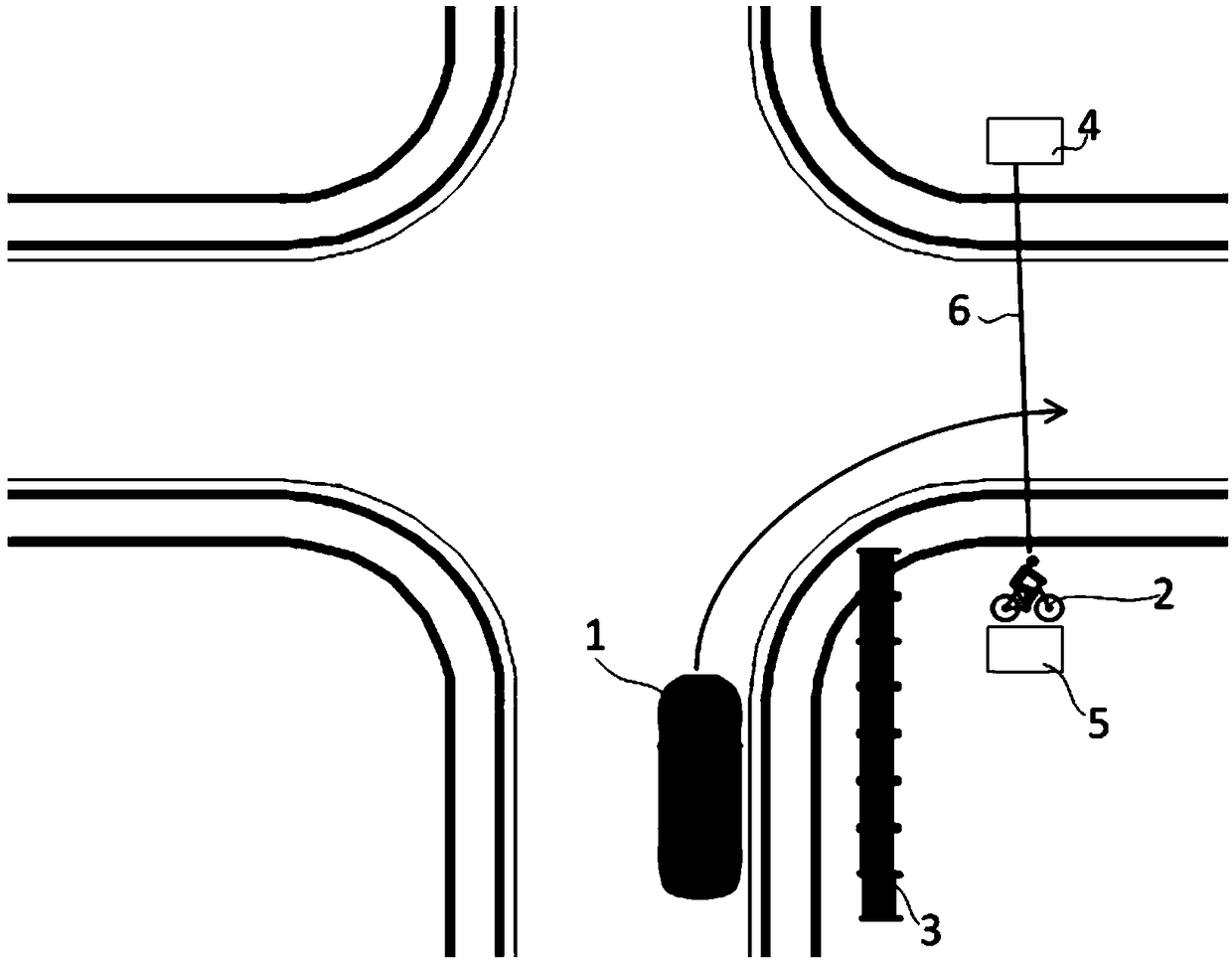
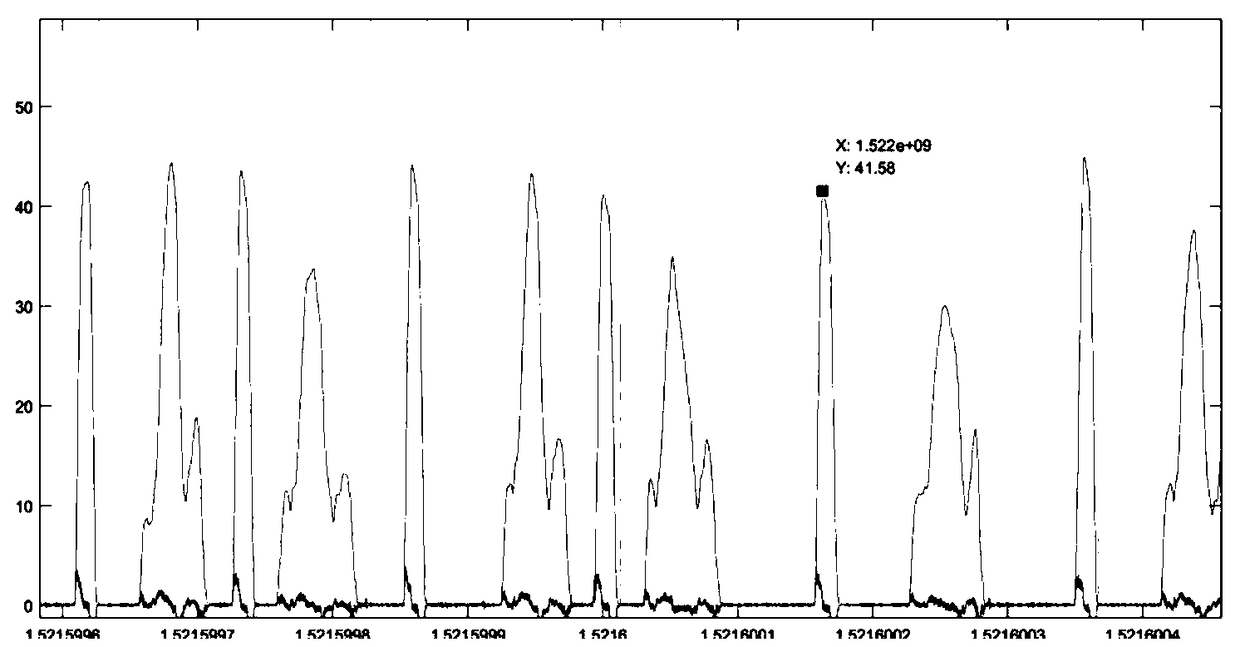
[0028] Such as figure 1 As shown, a scene test method for a smart car based on ADAS function, including the following steps: select the first lane for the smart car to run, and a lane adjacent to the first lane and in the same direction for the mobile target car to run The second lane, demarcate the only smart car and divide the first lane and the second lane into acceleration section, steady speed section, test section and deceleration section; adopt control device to control the smart car and the moving target The starting time point and driving state of the car, given the trigger signal that the smart car turns to the second lane during the test section, determine whether the smart car collides with the moving target car, if not, record, save and Upload test data and environment variables to the host computer, repeat the test to generate a test curve; if so, intervene in the brakes and restart the test.
[0029] A guardrail is provided between the first lane and the second...
Embodiment 2
[0033] Such as Figure 1 to Figure 2 As shown, a scene test method for a smart car based on ADAS function, including the following steps: select the first lane for the smart car to run, and a lane adjacent to the first lane and in the same direction for the mobile target car to run The second lane, demarcate the only smart car and divide the first lane and the second lane into acceleration section, steady speed section, test section and deceleration section; adopt control device to control the smart car and the moving target The starting time point and driving state of the car, given the trigger signal that the smart car turns to the second lane during the test section, determine whether the smart car collides with the moving target car, if not, record, save and Upload test data and environment variables to the host computer, repeat the test to generate a test curve; if so, intervene in the brakes and restart the test. Described smart car keeps course angle 0 ° when described...
Embodiment 3
[0036] The present invention adopts the following props during implementation: a moving target vehicle, a test prop used to replace a real bicycle in a test. The soft target target vehicle is used here, which can avoid damage to the mobile target vehicle in the event of a collision, and can restore the visual and radar characteristics of the real vehicle; the guardrail, the support structure of the guardrail is replaced by plastic material, and the exterior is wrapped with a metal layer to restore the real Visual and radar characteristics of metal barriers; control devices (such as Figure 4 shown).
[0037] In the implementation process of the present invention, the test parameters of the control device are first set, and then the corresponding test section is selected. In the test section, the corresponding acceleration section, steady speed section, test section and deceleration section are matched with different colors for each stage. The cone is used as a distinction to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com