


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
A soft manipulator embedded in a rubber hose
A technology of rubber hoses and manipulators, applied in manipulators, manufacturing tools, chucks, etc., can solve the problems of low transmission efficiency, poor environmental adaptability, complex environment, etc., to increase the coating capacity, good adaptability, and save complex processes. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
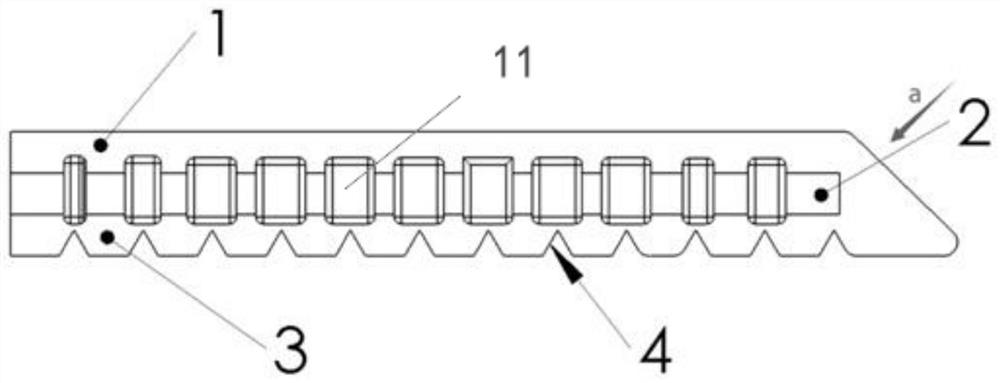
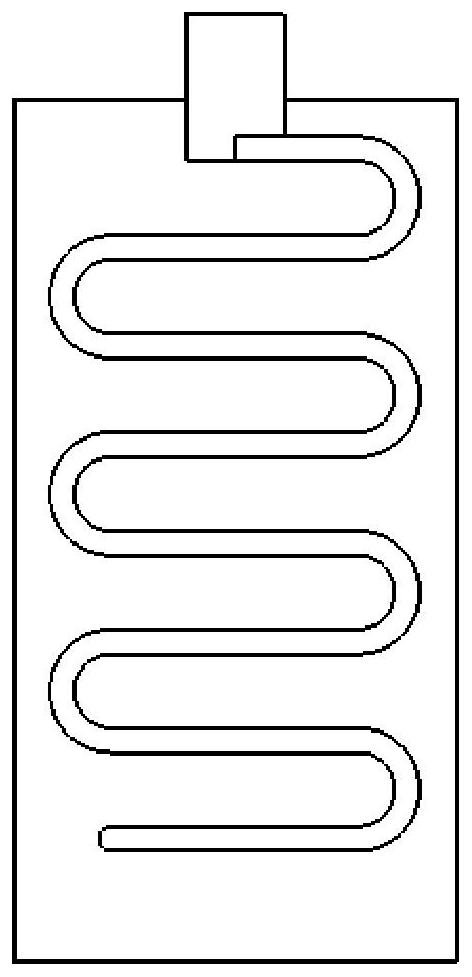
[0030] Such as Figure 6 As shown, a soft manipulator embedded in a rubber hose includes 3 soft tentacles of the same specification and a rigid frame for installing the soft tentacles. The inside of the tentacles is injected with layered glue. One layer is a composite layer of silica gel and fiber, and rubber hose 11 is laid in a continuous U-shape in the middle layer of silica gel. The rubber hose is a high-elastic latex tube, and the outer layer is silica gel. Set the length of each tentacle as L, the width as W, and the width of the continuous U-shaped laying of the rubber hose as W 1 , The opening distance of a single U-shape is L 1 , where 1 / 21 / W1 / L1 / W,L 1 The value of / L, under the condition that the pressure P of the air pump is constant, the bending degree of the tentacle is the same as W 1 / W is proportional to L 1 / L is inversely proportional to W 1 The larger the / W, the wider the U-shaped width of the rubber hose laying, L 1 The smaller the / L, the denser ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com