Fine granularity classification-based unmanned aerial vehicle identifying and locating method
A positioning method and UAV technology, which is applied in character and pattern recognition, image analysis, computer parts, etc., can solve the problems of inaccurate recognition and positioning of UAVs, and achieve the effect of accurate positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
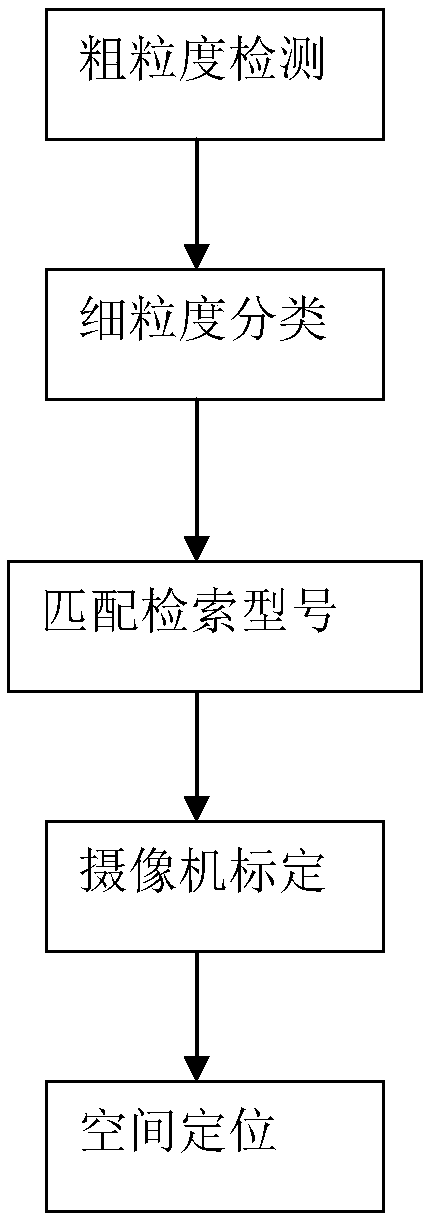
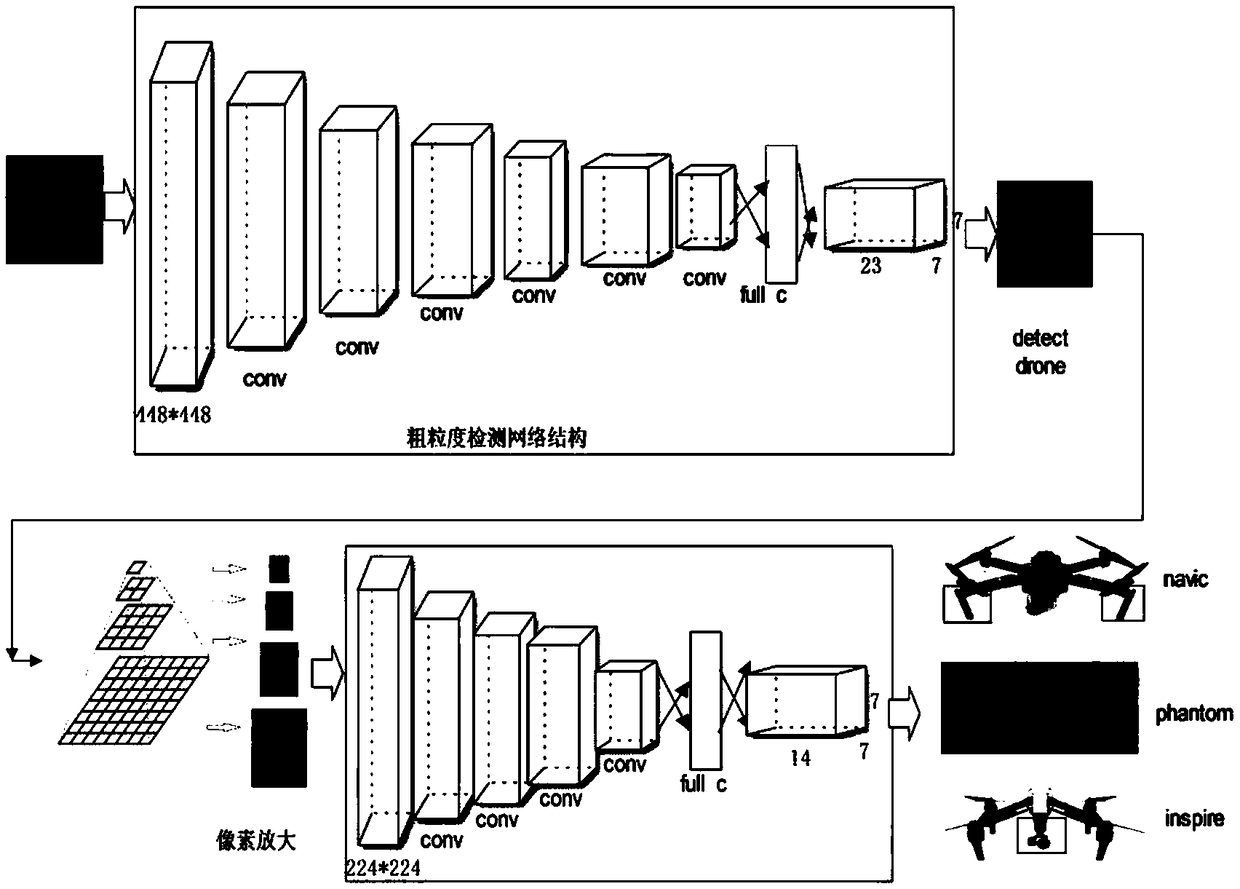
[0033] Such as figure 1 As shown, in the UAV identification and positioning method based on fine-grained classification of the present invention, in order to realize fine-grained classification, the UAV data set library is first established. At present, there is no data set library that can meet the requirements of fine-grained classification and detection. Existing ones can only satisfy coarse-grained classification. The invention collects a huge data set satisfying many types of drones and parameter information through experiments, establishes a computer vision database satisfying fine-grained classification, and performs fine-grained classification of drones. Compared with the existing data set database, the computer vision database of the present invention can see the dynamic visualization of the data set and mark the detailed model inform...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com