Piezoelectric ceramic actuator control method based on particle swarm algorithm
A particle swarm algorithm and piezoelectric ceramic technology, applied in piezoelectric effect/electrostrictive or magnetostrictive motors, generators/motors, electrical components, etc., can solve the difficulty in meeting the accuracy requirements and the difficult calculation of the inverse model , unfavorable precision control and other issues, to achieve the effect of eliminating hysteresis characteristics, simplifying the optimal control problem, and reducing the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
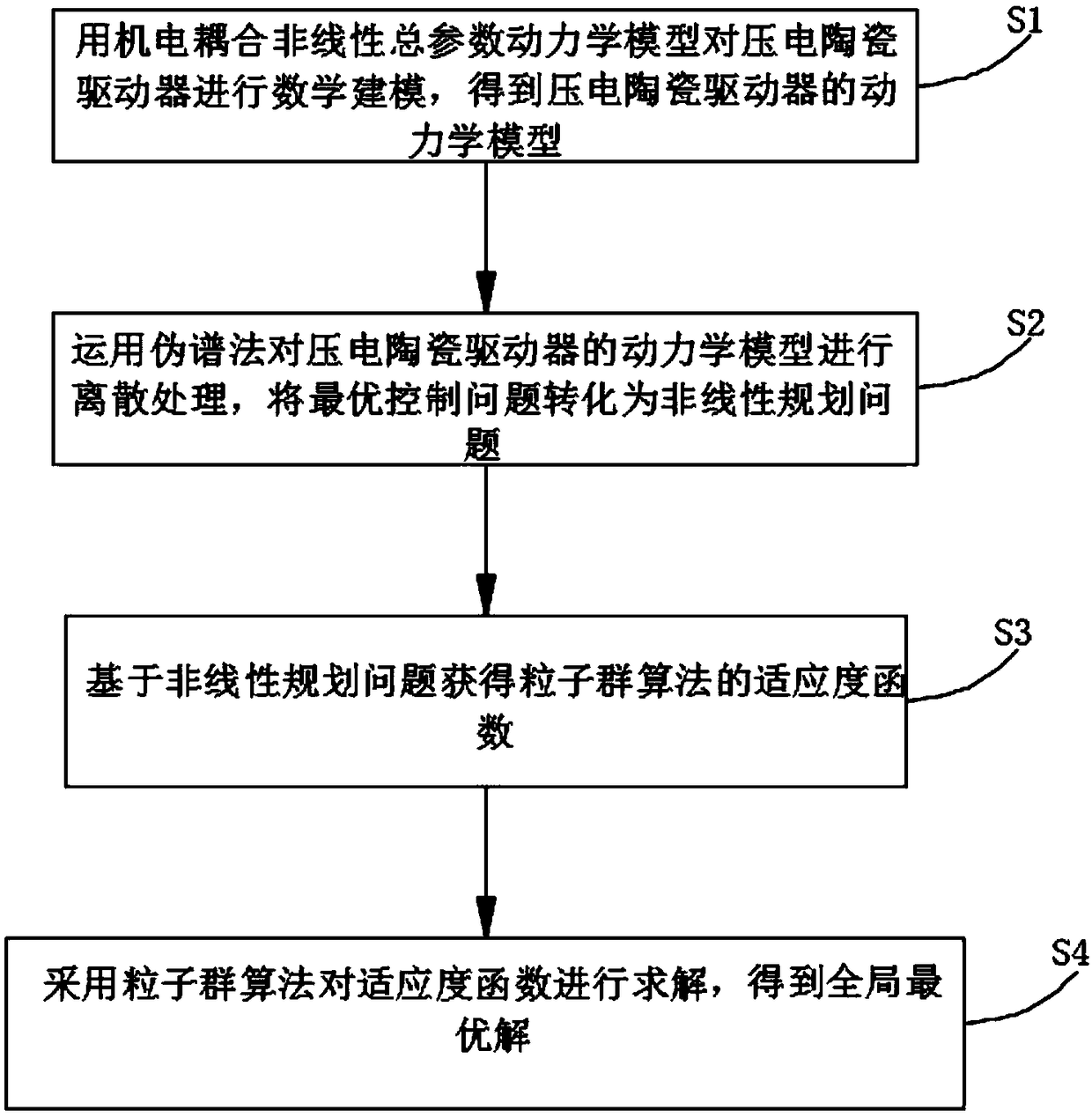
[0053] Please refer to figure 1 , a piezoelectric ceramic actuator control method based on a particle swarm algorithm, comprising the following steps:
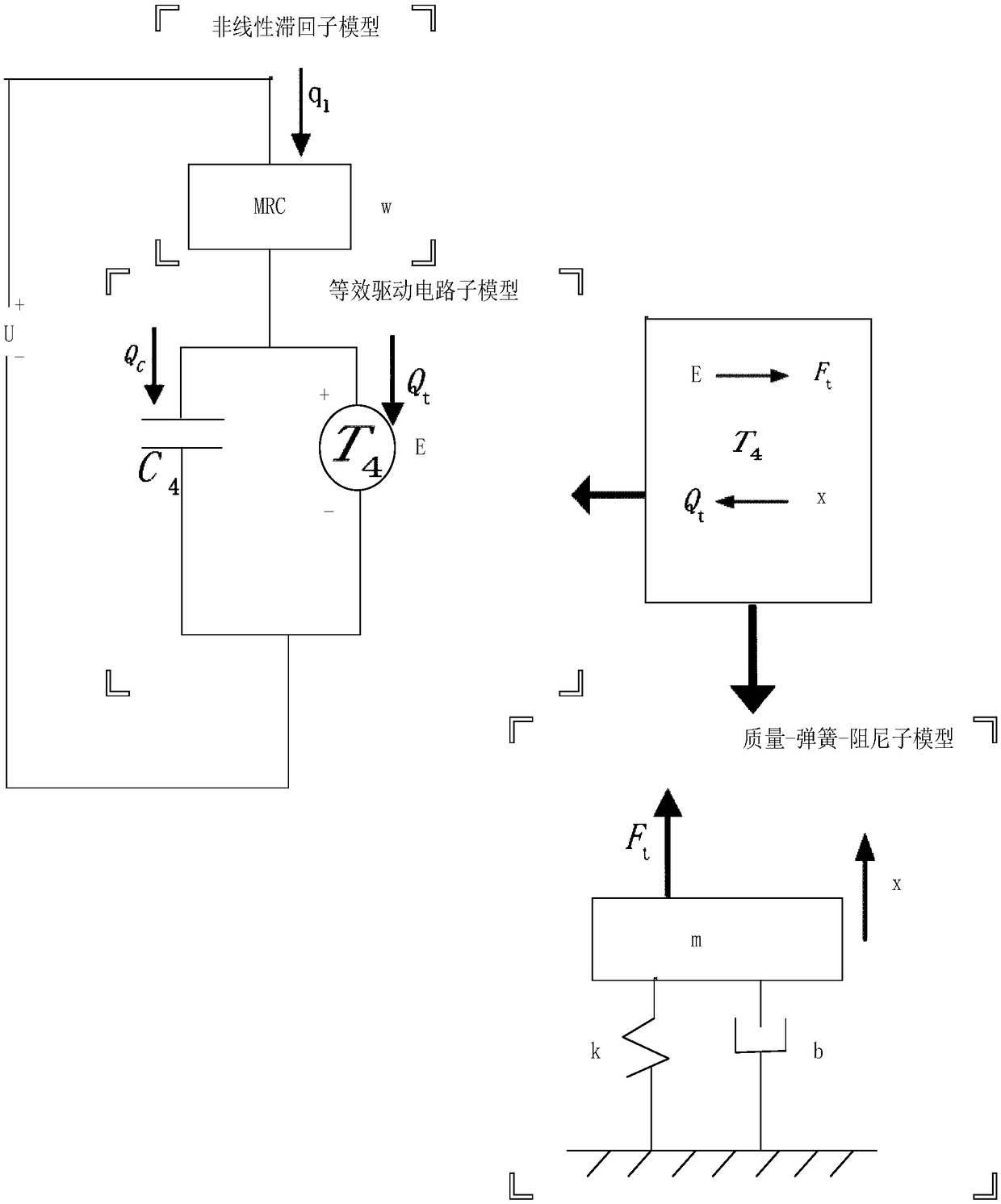
[0054] S1. The piezoelectric ceramic driver is mathematically modeled with the electromechanical coupling nonlinear total parameter dynamic model, and the dynamic model of the piezoelectric ceramic driver is obtained as:
[0055]
[0056]
[0057] Where x is the actual output displacement, y is the expected displacement, u is the control variable, u T is the transposition matrix of u, Q and R are weight matrices, q is the linear partial charge of the total charge flowing through the nonlinear hysteretic sub-model, w is the input voltage of the nonlinear hysteretic sub-model, b is the damping coefficient, and k is Spring stiffness, m is the equivalent mass of the piezoelectric stack, T 1 , T 2 , T 3 , S 1 、C 1 、C 2 and C 3 are constant coefficients, T 4 is the proportional coefficient of the electro-mechanical conv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com