Unmanned surface ship track tracking method based on actuator faults
A track tracking and actuator technology, applied in the direction of instruments, adaptive control, control/regulation systems, etc., can solve the problems of actuator failure, weak anti-interference and fault tolerance, slow convergence speed, etc., achieve simple structure, reduce Effects of cost, easier design and implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0091] Embodiment: Carry out Matlab simulation research with the CyberShip II unmanned surface ship in the document [], relevant parameters are given in Table 1.
[0092] Table 1 CyberShip II unmanned surface vessel parameters
[0093]
[0094] In this example, τ d =[8,3cos 2 (0.1πt), sin 2 (0.11πt)] T ; The initial state of the unmanned surface vehicle is η d (0)=[17, 17.8, π / 6] T , ν d (0)=[1,0,0] T , η(0)=[17,8.2,π / 3] T , ν(0)=[0,0,0] T .
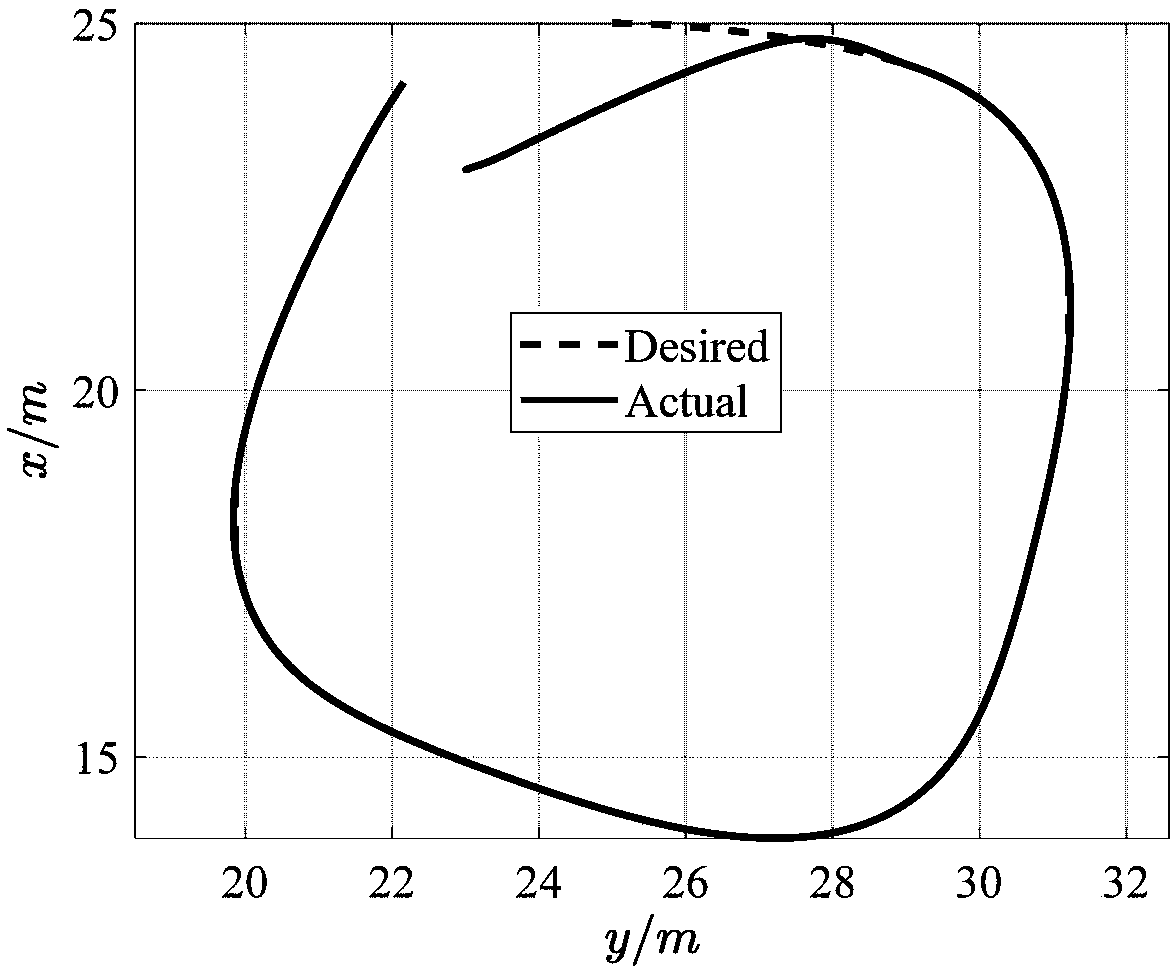
[0095] Correspondingly, the control parameters of our control law are: κ 1 =0.15, κ 2 =0.15, κ 3 =diag(0.2,0.2,0.2),κ 4 =diag(0.1,0.1,0.2),β 1 = 1 / 3, β 2 =1 / 2, ρ=1 / 3. Simulation results such as Figure 4-6 shown.
[0096] from image 3 It can be seen that even if the unmanned ship suffers from complex controller failures and external disturbances, the control law designed in the present invention can realize fast and accurate track tracking control.
[0097] In addition to position tracking, the control law can als...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com