Mobile robot navigation method based on binocular camera and two-dimensional laser radar
A two-dimensional lidar, binocular camera technology, applied in navigation computing tools, instruments, re-radiation of electromagnetic waves, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0088] Embodiment: The mobile robot navigation based on the binocular camera and the two-dimensional laser radar is completed on the KOBUKI mobile robot platform.
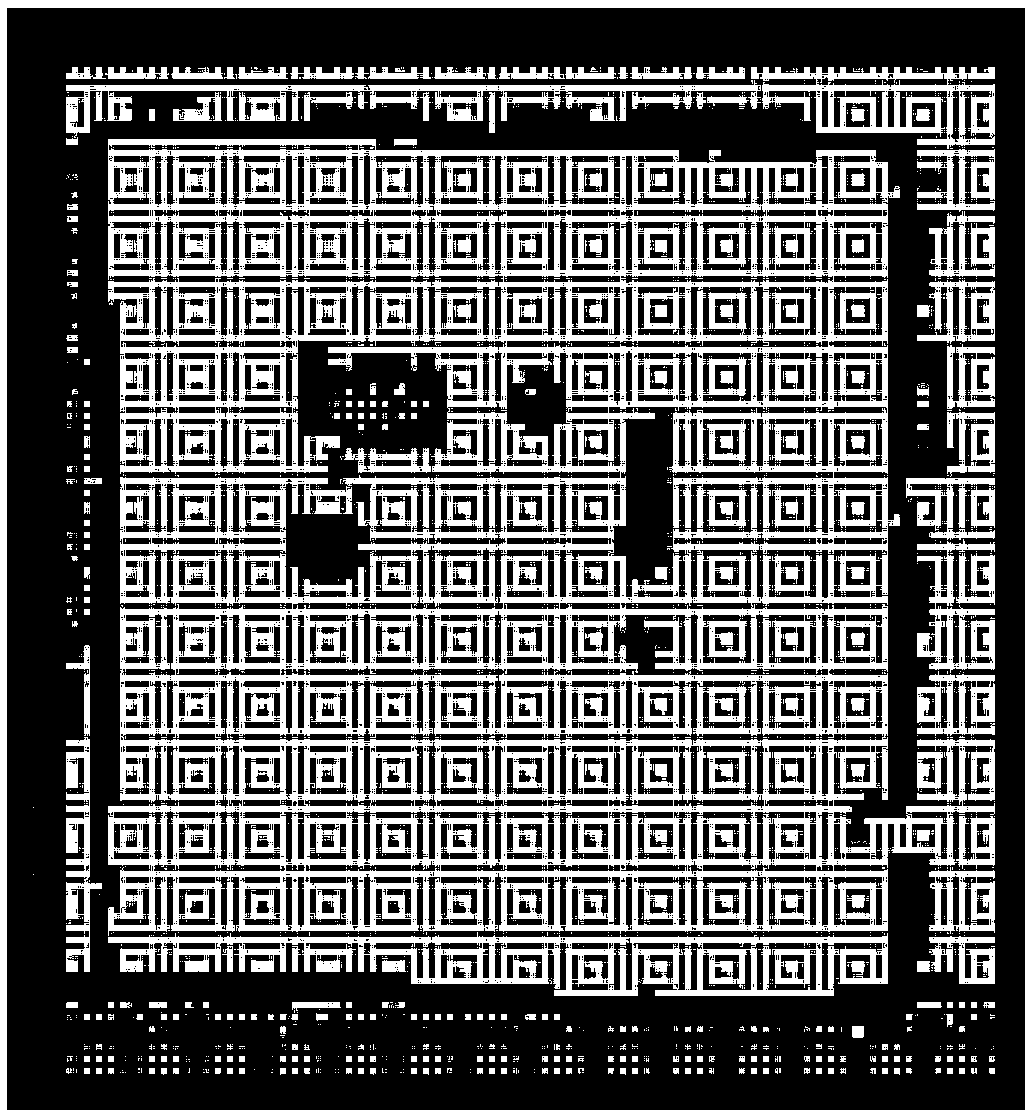
[0089] (1) Two-dimensional grid map model
[0090] 2D raster map such as figure 1 As shown, the stored information includes the number of pixels in each row and the total number of rows of the map image. Each pixel in the map represents a plane area with a length and width of 5 cm in the real environment. Black pixels represent obstacles in this area, and white pixels represent this area. There are no obstacles.
[0091] In this example, the width of the map image is 50 pixels, and the height is 60 pixels, which represents an experimental site with a width of 2.5 meters and a length of 3 meters, such as figure 2 shown.
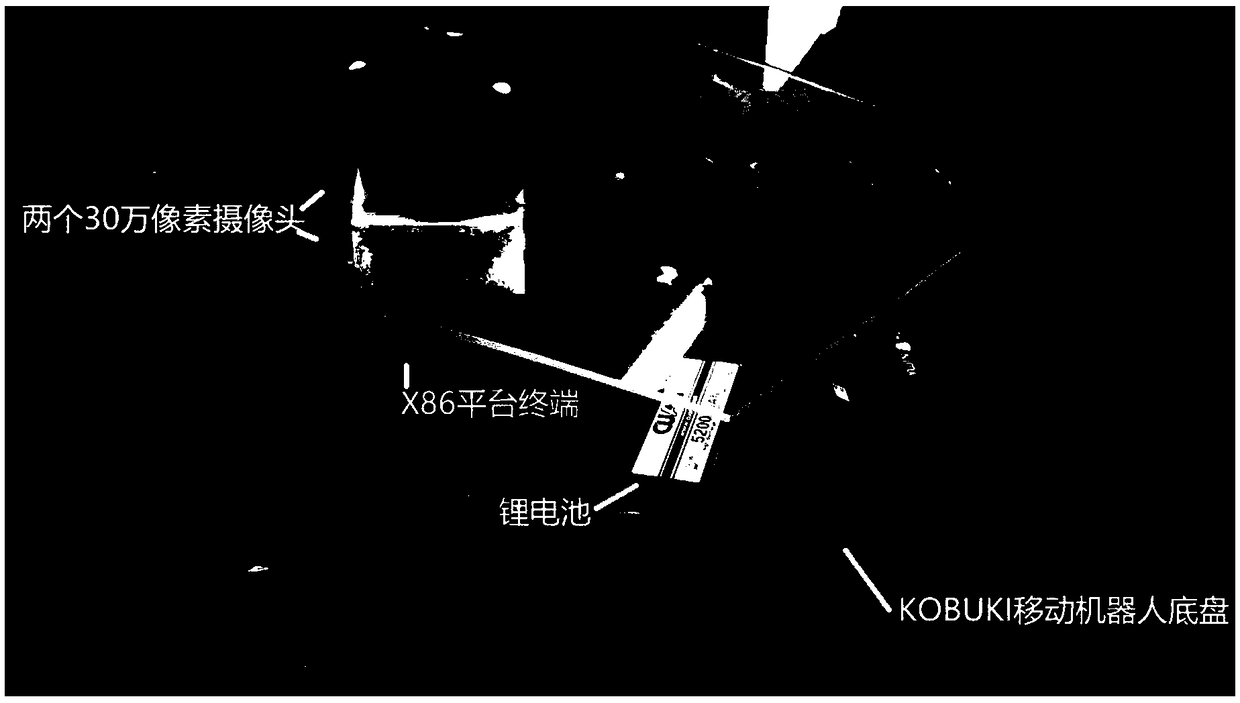
[0092] (2) Mobile robot platform model
[0093] In the selection of the mobile robot hardware platform, KOBUKI universal mobile robot base, LSLIDAR2D lidar and two ordinary 300,000-pixel camer...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com