ROS-based service robot and multi-target autonomous cruise method
A service robot and target location technology, applied in the field of ROS-based service robots and their multi-target autonomous cruises, can solve the problems of lack of ability to solve emergencies, high cost of service robots, and difficulty in commercialization. The function of computer interaction, rich environmental information, and the effect of accurate response
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] Below in conjunction with accompanying drawing, further elaborate the present invention.
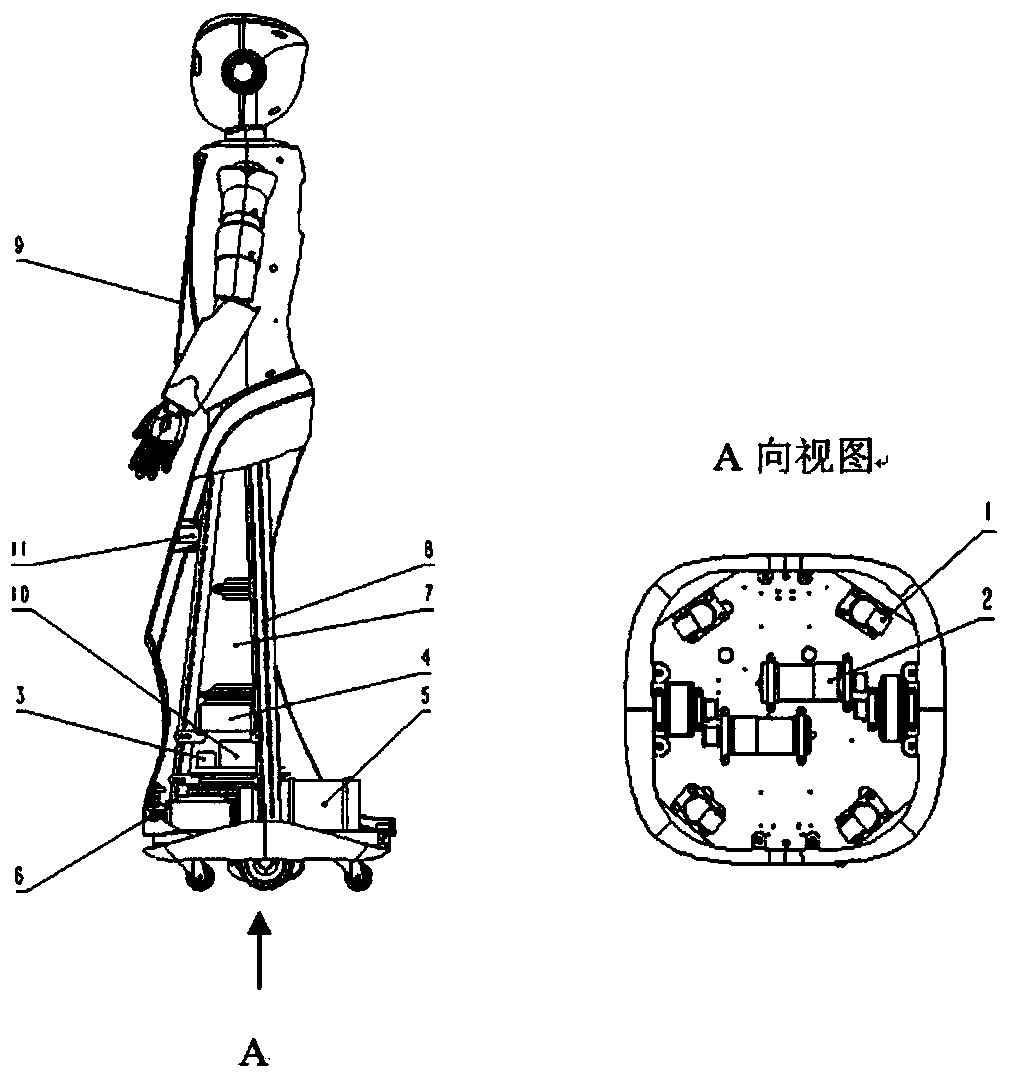
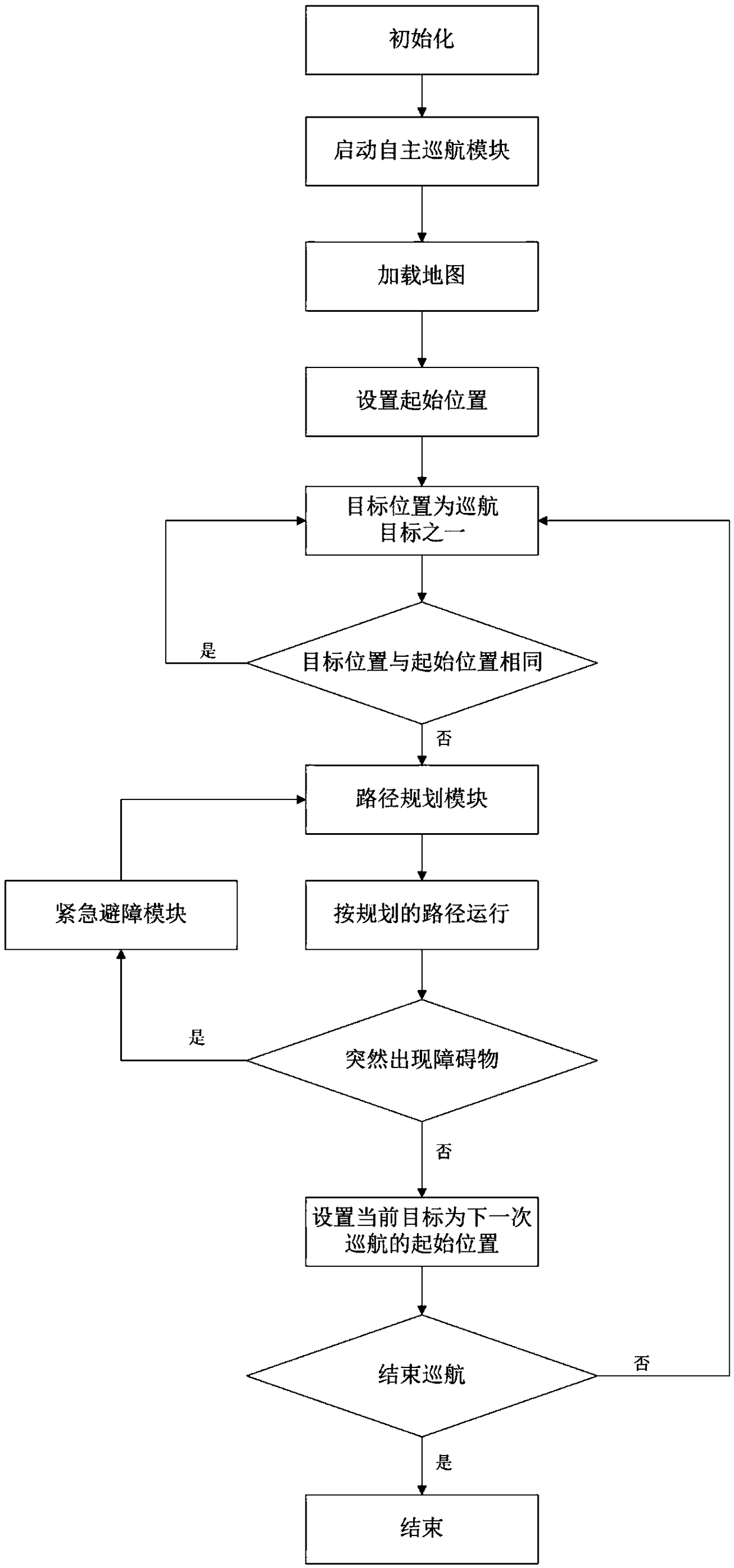
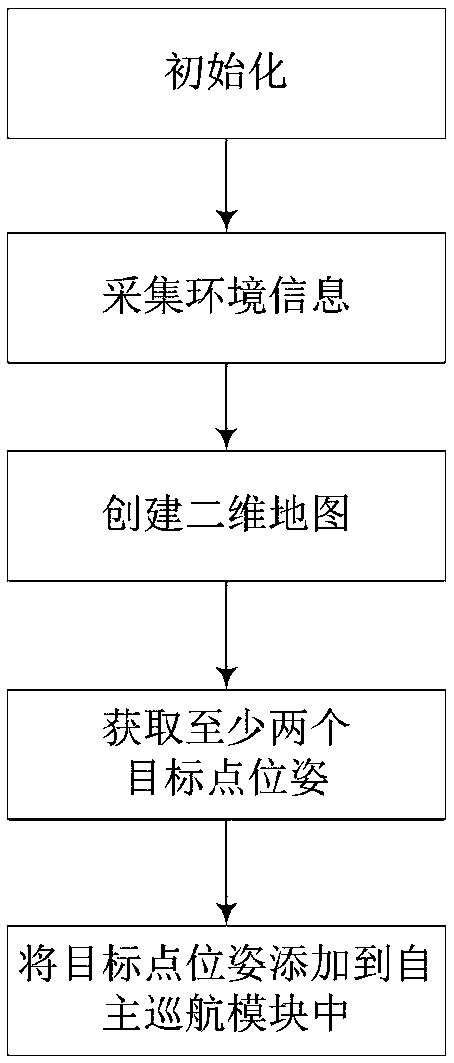
[0043] The present invention relates to a ROS-based service robot and its multi-target autonomous cruising method. The service robot is a humanoid robot, which includes a mobile chassis, a shell 7 and a support frame 8, and a PC10. The mobile chassis includes a drive-guided support wheel set 1, a motor module 2, a gyroscope 3, an electronic compass 4, a power supply module 5 and an emergency obstacle avoidance module 6. A touch screen display 9 and a data acquisition module 11 are installed on the shell. The PC communicates with the emergency obstacle avoidance module 6, the data acquisition module 11 and the motor module 2 respectively through the USB serial port. After starting the service robot and the data acquisition module 11, the service robot is controlled to run in an unknown environment, the astra depth camera installed on the shell collects environmental information, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com