Robot bionic skin based on optical fiber sensing, positioning method of robot bionic skin and application of robot bionic skin
A positioning method and optical fiber sensing technology are applied in the field of robotic bionic skin and its positioning to achieve the effects of convenient flexible packaging, high positioning accuracy and large sensing range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0038] A bionic skin based on optical fiber sensing technology, comprising: an optical fiber skin band 2 and an optical fiber demodulation device 3, by connecting one end of the optical fiber skin band 2 with the optical fiber demodulation device 3, in order to touch an optical fiber skin band 2 To achieve the purpose of dual perception of force and temperature, the optical fiber skin belt 2 described in this application includes a single-mode optical fiber and a multi-mode optical fiber, and the single-mode optical fiber and multi-mode optical fiber arranged side by side are flattened and packaged by flexible materials The optical fiber demodulation device 3 includes a Brillouin demodulator and a Raman demodulator, the Brillouin demodulator is used for distributed measurement of force, and the Raman demodulator is used for distributed measurement of temperature, and The single-mode fiber is connected to the Brillouin demodulator, and the multi-mode fiber is connected to the Ra...
Embodiment 2
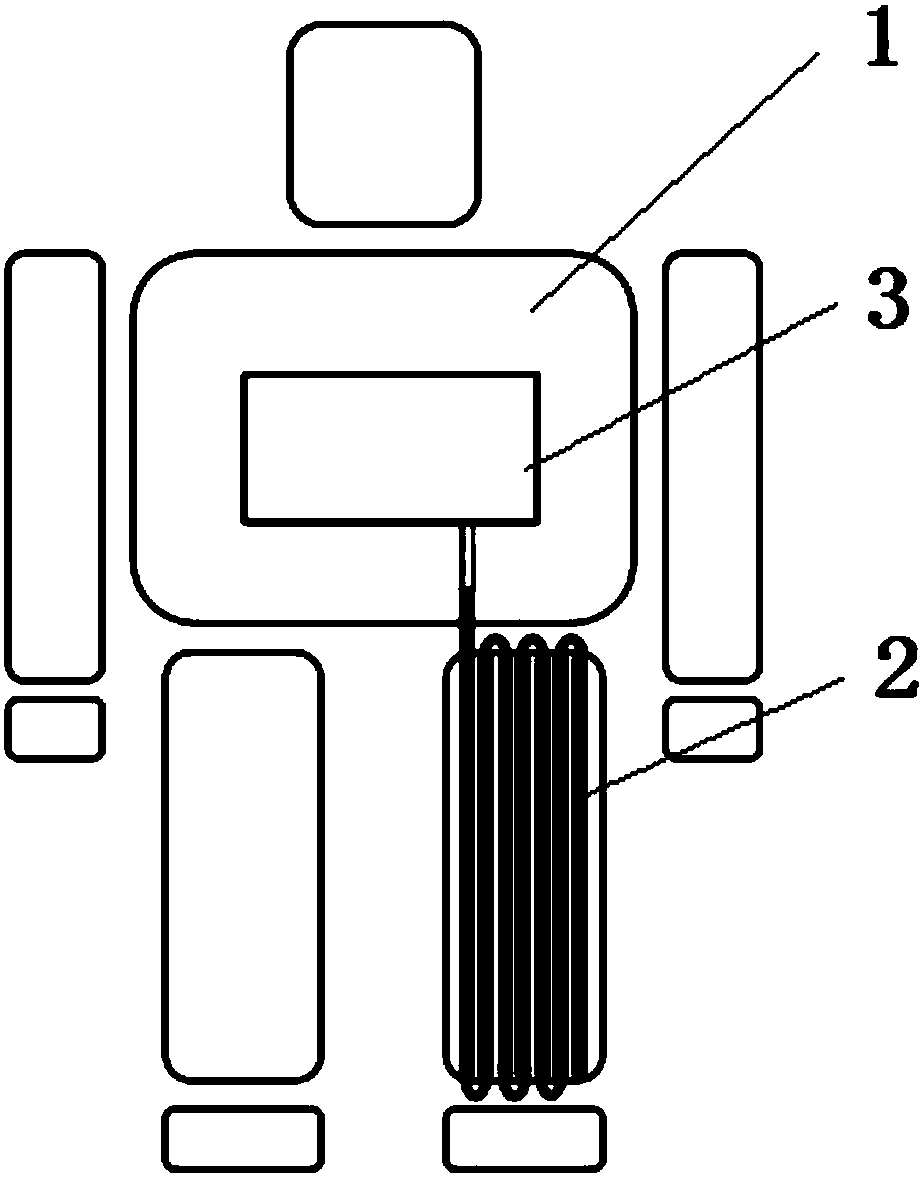
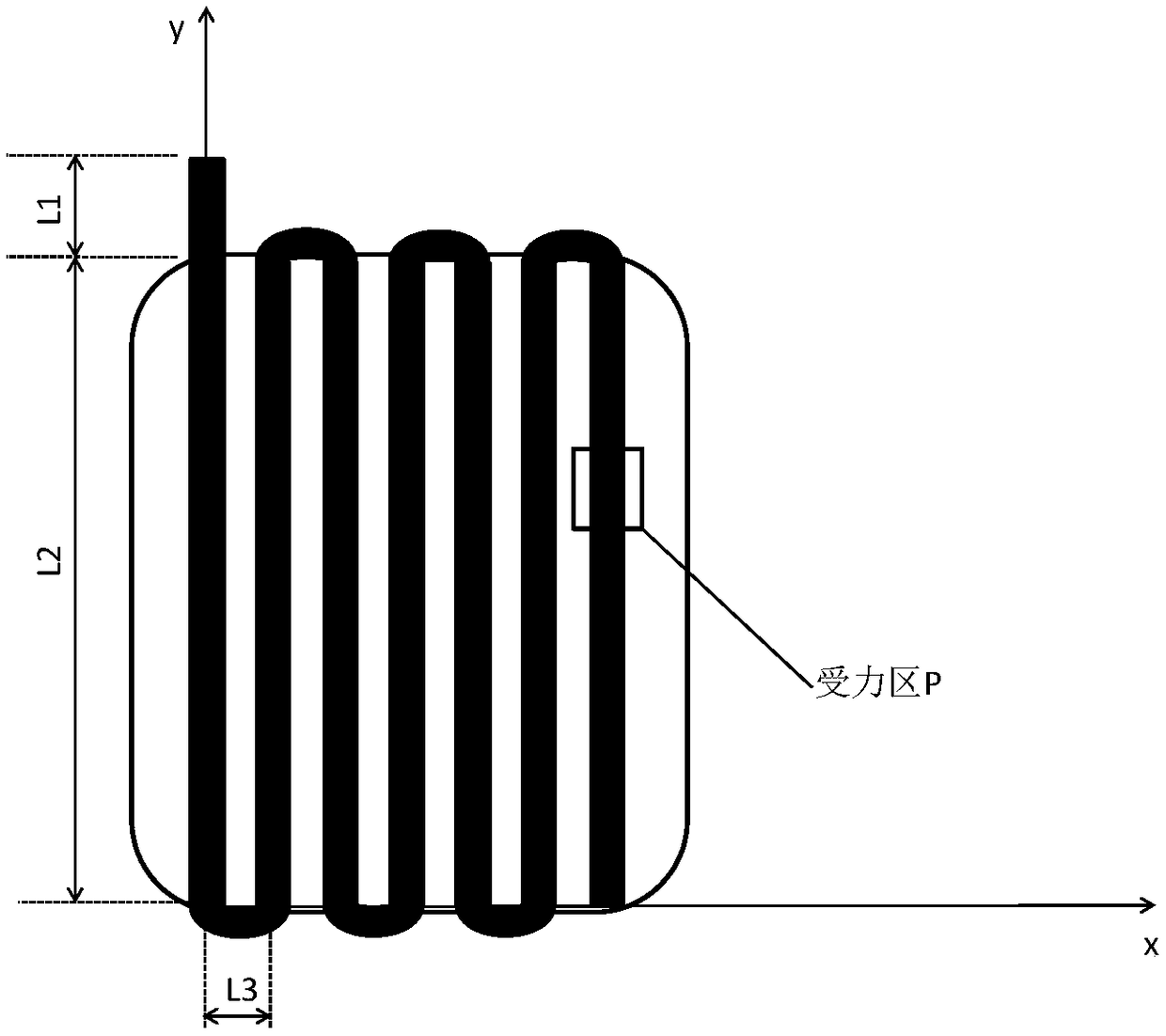
[0076] Such as figure 1 and figure 2 Shown, a kind of robot that applies bionic skin perception function, comprises robot body 1, and this robot adopts the bionic skin based on the optical fiber sensing technology described in embodiment 1, and the optical fiber skin band 2 in described bionic skin is in S type etc. The spacing is pasted and arranged on the outer surface of the robot body 1, an optical fiber demodulation device 3 and a controller are installed on the torso of the robot body 1, and the controller is connected to one end of the optical fiber skin belt 2 through the optical fiber demodulation device 3. The controller can be selected from the model FX3U-48MTES-A. The optical fiber demodulation device 3 includes a Brillouin demodulator and a Raman demodulator. The Brillouin demodulator is used for distributed measurement of force, Raman The demodulator is used for distributed measurement of temperature. The optical fiber skin belt 2 includes a single-mode optical...
Embodiment 3
[0079] A sensory positioning method for bionic skin, the method is based on the robot described in Embodiment 2, and the optical fiber skin belt 2 is equidistantly arranged on the outer surface of the robot body 1, and one end of the optical fiber skin belt 2 is connected to the optical fiber demodulation device 3 For connection, the optical fiber skin band 2 includes a single-mode optical fiber and a multi-mode optical fiber, and is flattened by a flexible material, and the optical fiber demodulation device 3 includes a Brillouin demodulator and a Raman The demodulator, the Brillouin demodulator is connected with single-mode fiber for distributed force measurement; the Raman demodulator is connected with multi-mode fiber for distributed temperature measurement.
[0080] The specific positioning method is:
[0081] S1: Determine the mutation area through the variation curve. The initial state measured by the optical fiber demodulation device 3 obtains the strain curve S0, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com