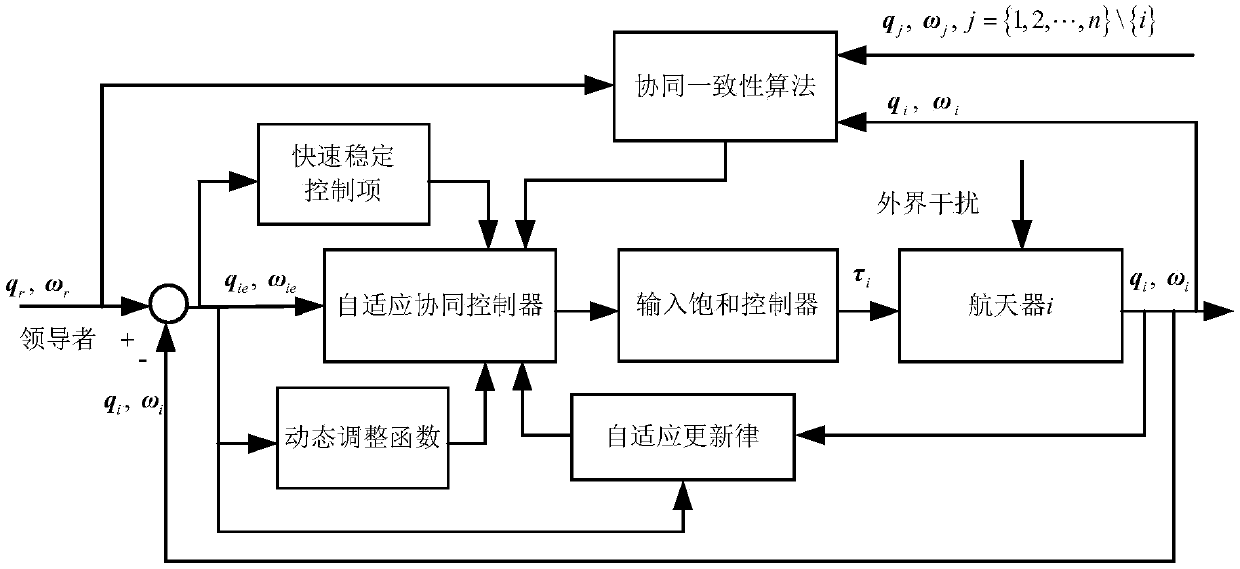
Input saturation self-adaptive gesture collaborative tracking control method
A tracking control and tracking controller technology, applied in the field of multi-spacecraft formation flight, can solve problems such as unknown degree of change, and achieve the effects of easy engineering implementation, simple structure, and reduction of the frequency of saturation occurrence.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
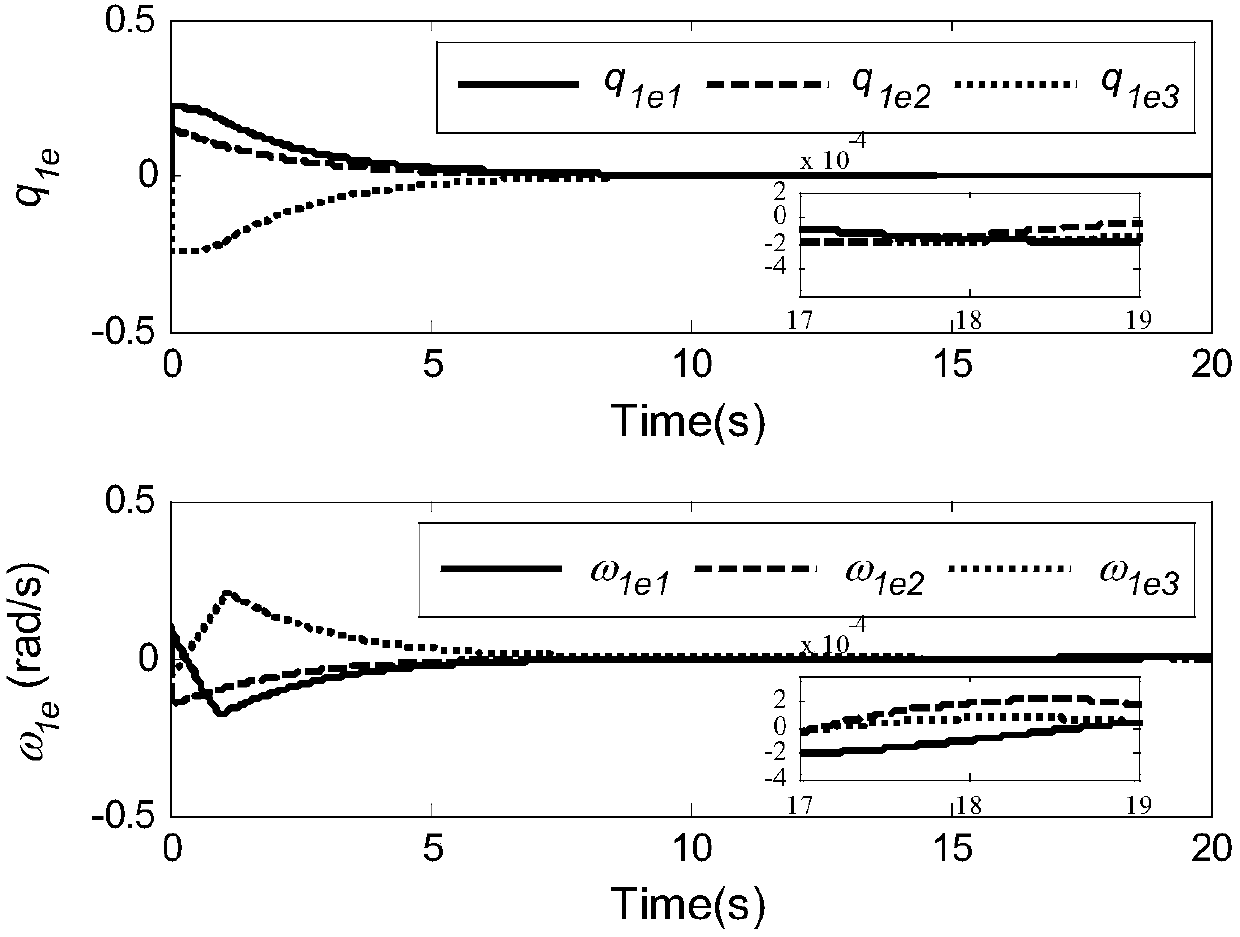
[0050] A formation system consisting of 4 follower spacecraft and 1 virtual leader is used as the research object, and the specific parameters are as follows:
[0051] Table 1. Spacecraft inertia matrix and initial attitude
[0052]
[0053] Desired trajectory of the spacecraft: q r =0.2[cos(0.2t), sin(0.2t), 2sin(0.2t)] T , The angular velocity can be obtained by formula (2). Input torque saturation value τ 1max =[4,5,3] T Nm, τ 2max =[5,5,6] T Nm, τ 3max =[7.5,6,6.5] T Nm, τ 4max =[3,5.5,4.5] T Nm. External disturbance τ id =(5+10||ω i || 2 )[0.02sin(t),0.05cos(t),0.03cos(t)] T . The controller parameter is k 1 =k 2 =k 3 =k 4 =50,k 11 =k 21 =k 31 =k 41 =50, α=7 / 9, β=1, β 11 = β 21 = β 31 = β 41 =0.01, β 12 =80,β 14 = β 24 = β 34 = β 44 = 0.1, β 22 =60 and β 32 = β 42 =100.
[0054] First, build the spacecraft formation system model in MATLAB / Simulink, and the simulation time is 20s.
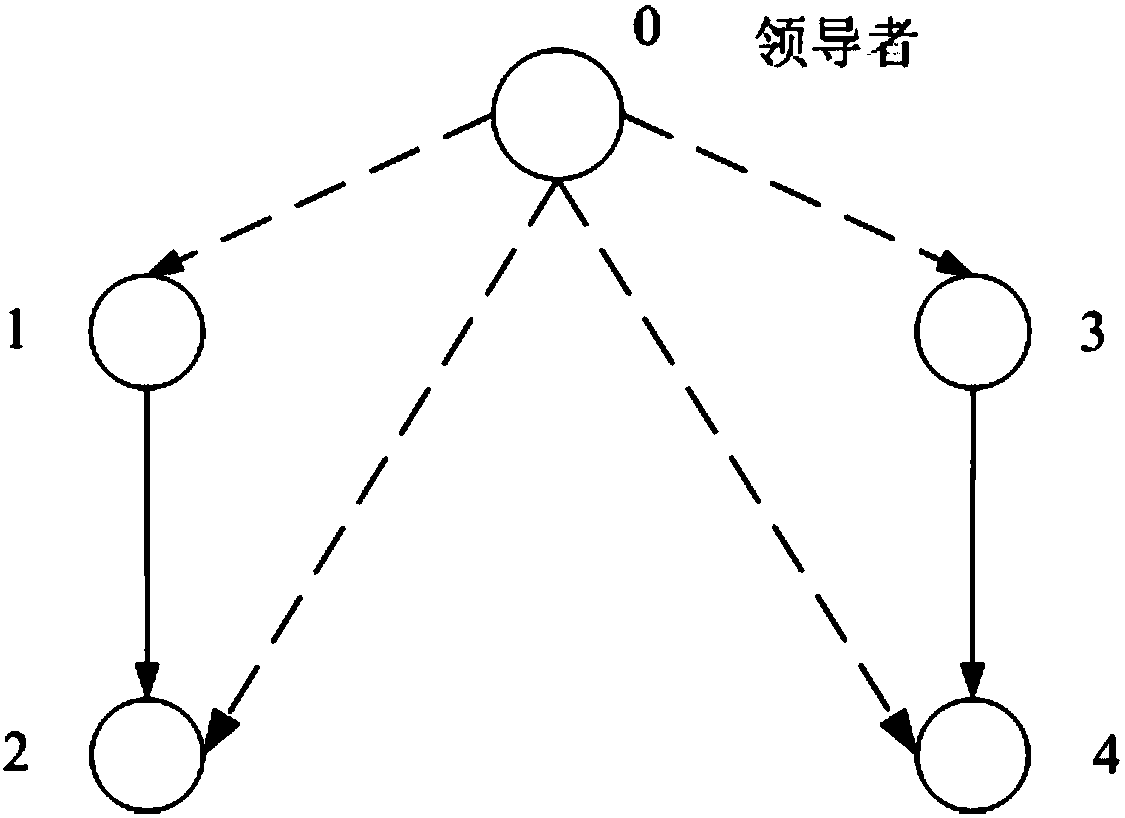
[0055] figure 2 A directed communication topolo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com