Electro-hydraulic position servo system multi-model robust self-adaptive control method
An electro-hydraulic position servo and robust self-adaptive technology, which is applied in the direction of self-adaptive control, general control system, control/regulation system, etc., and can solve problems such as system influence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
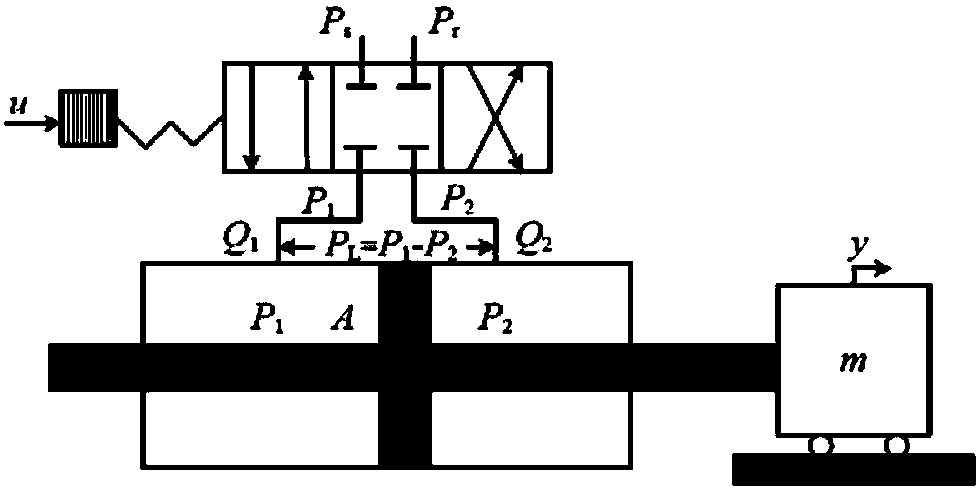
[0226] In order to assess the performance of the designed controller, the following parameters are taken in the simulation to model the electro-hydraulic position servo system:
[0227] The load mass m=30kg, the annular working area A of the inner chamber of the hydraulic cylinder=9.05×10 -4 m 2 , the total volume of the hydraulic cylinder V t =7.96×10 -5 m 3 , effective oil elastic modulus β e =200MPa, internal leakage coefficient C t =1×10 -12 m 5 / (N s), viscous friction coefficient B=4000N s / m, total flow gain Oil supply pressure P s =10MPa, oil return pressure P r =0.08MPa, pressure dynamic modeling error q(t)=2×10 -7 m 3 / (s / m), external load disturbance f(t)=500sint(N·m).
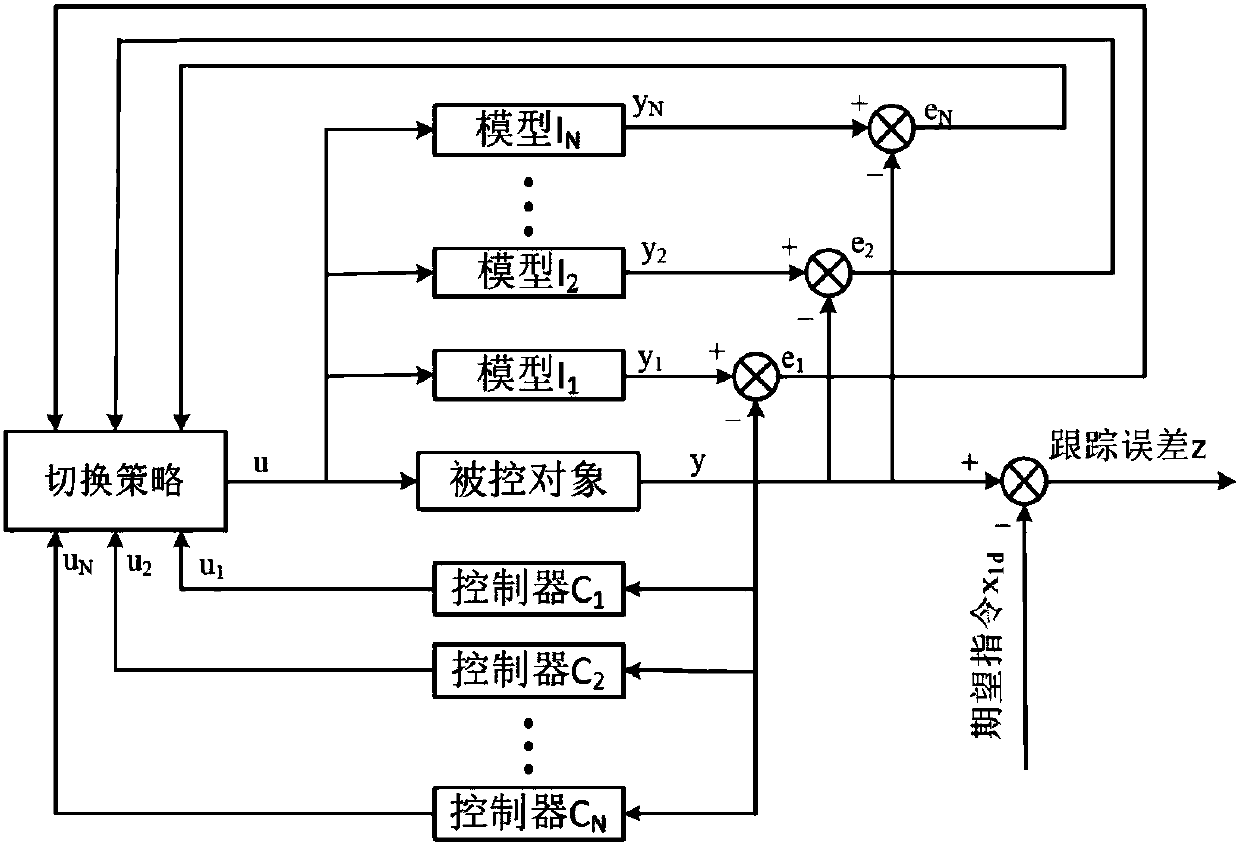
[0228] Multi-model Robust Adaptive Controller (MMRAC): Take the controller parameter λ 1 =1000,λ 2 =500,λ 3 =200,k 1 =1000,k 2 =200,k 3 = 10, θ pmin =[-3.5×10 6 ,-2750,2,-200] T , θ pmax =[-6.5×10 4 ,100,200] T , in this simulation test, five identification models were establ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com